2025/03/24-IP跑掉重新設定教學
- 開啟CMD,輸入ssh pi@raspberrypi
- 輸入後會教你輸入密碼,輸入密碼時會看不到內容所以請確定沒打錯,密碼:raspberrt
- 等他跑完後輸入ifconfiig尋找IP,例如192.168.0.130or192.168.0.55 之類的
- 好了之後進入以下操作SOP的步驟
2024/07/10 軟體操作SOP
首先將無人車電源開啟(沒開啟會偵測不到軟體)
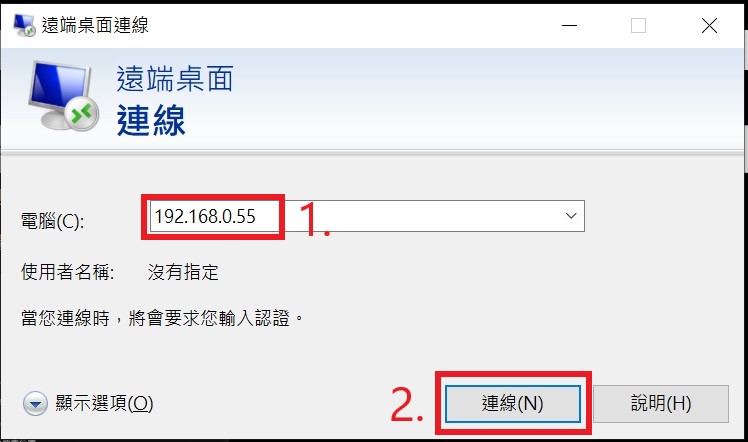
1.下方搜尋欄方格上搜尋"遠端桌面連線"並將它開啟
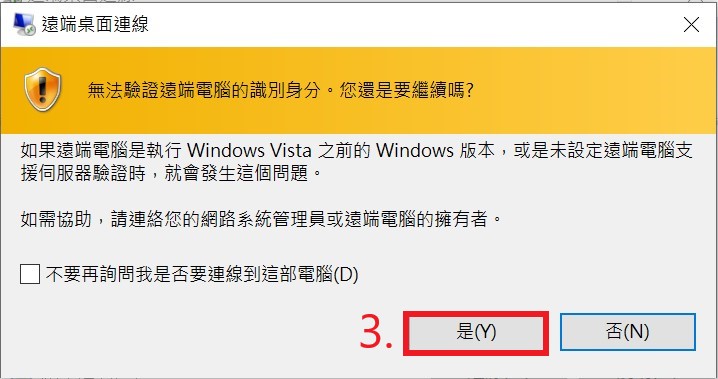
2.輸入ip:192.168.0.55並按下連線,是否驗證"是"

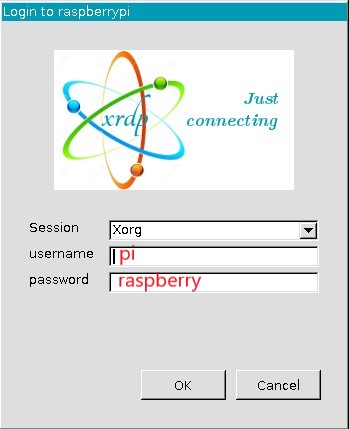
2.進去後會來到一個虛擬桌機畫面
登入帳號:pi
登入密碼:raspberry
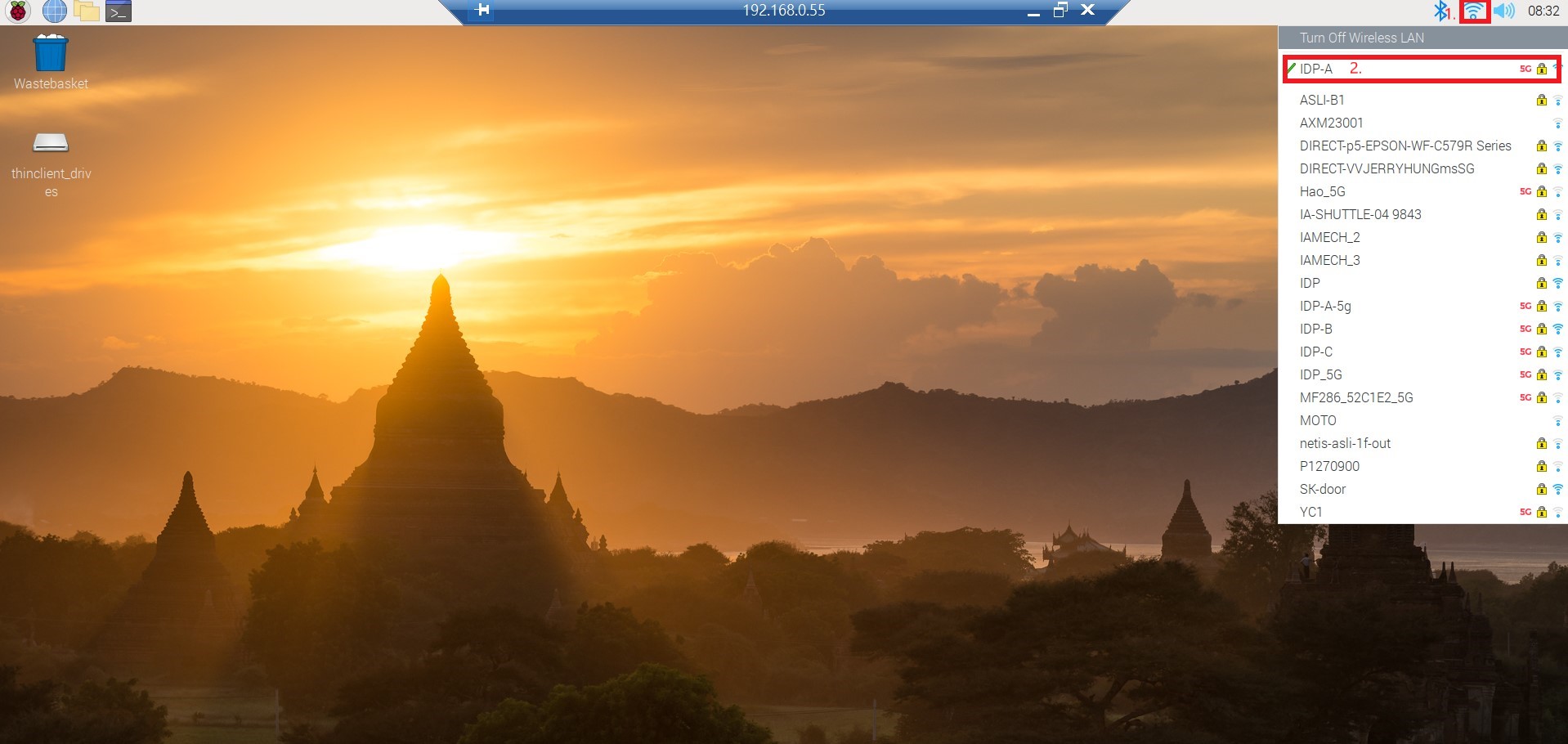
3.先設定WIFI網路,到時使用手機或筆記型電腦網頁控制時需跟虛擬畫面的網路一致
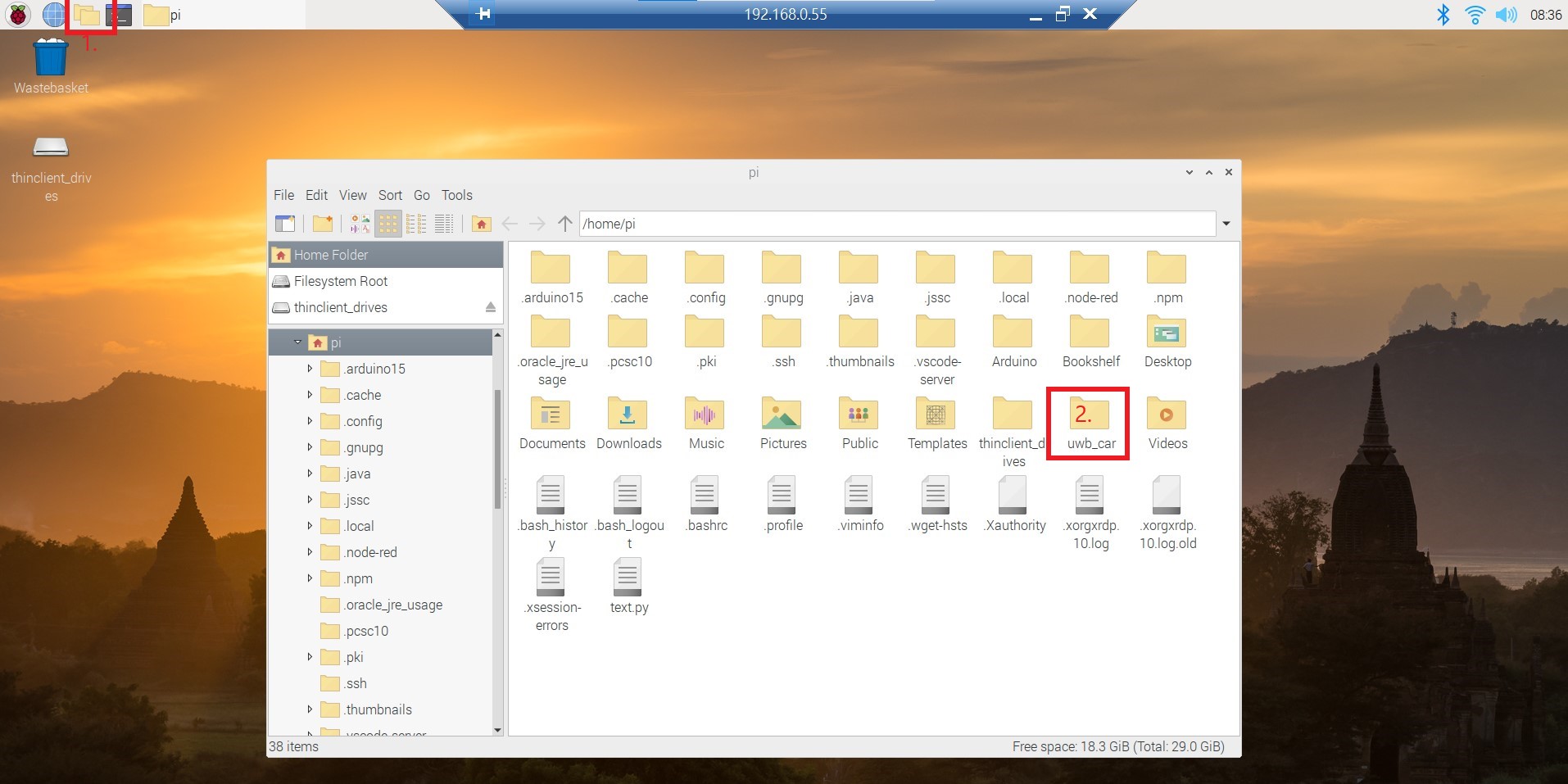
4.打開左上角資料夾圖示,開啟uwb.car資料夾,裡面的4個檔案為python程式碼檔,之後會用到
5.打開左上角小黑窗(命令提示字元)圖示,並在出現的黑色視窗輸入node-red並按下確認鍵,此代碼為開啟網頁控制模式
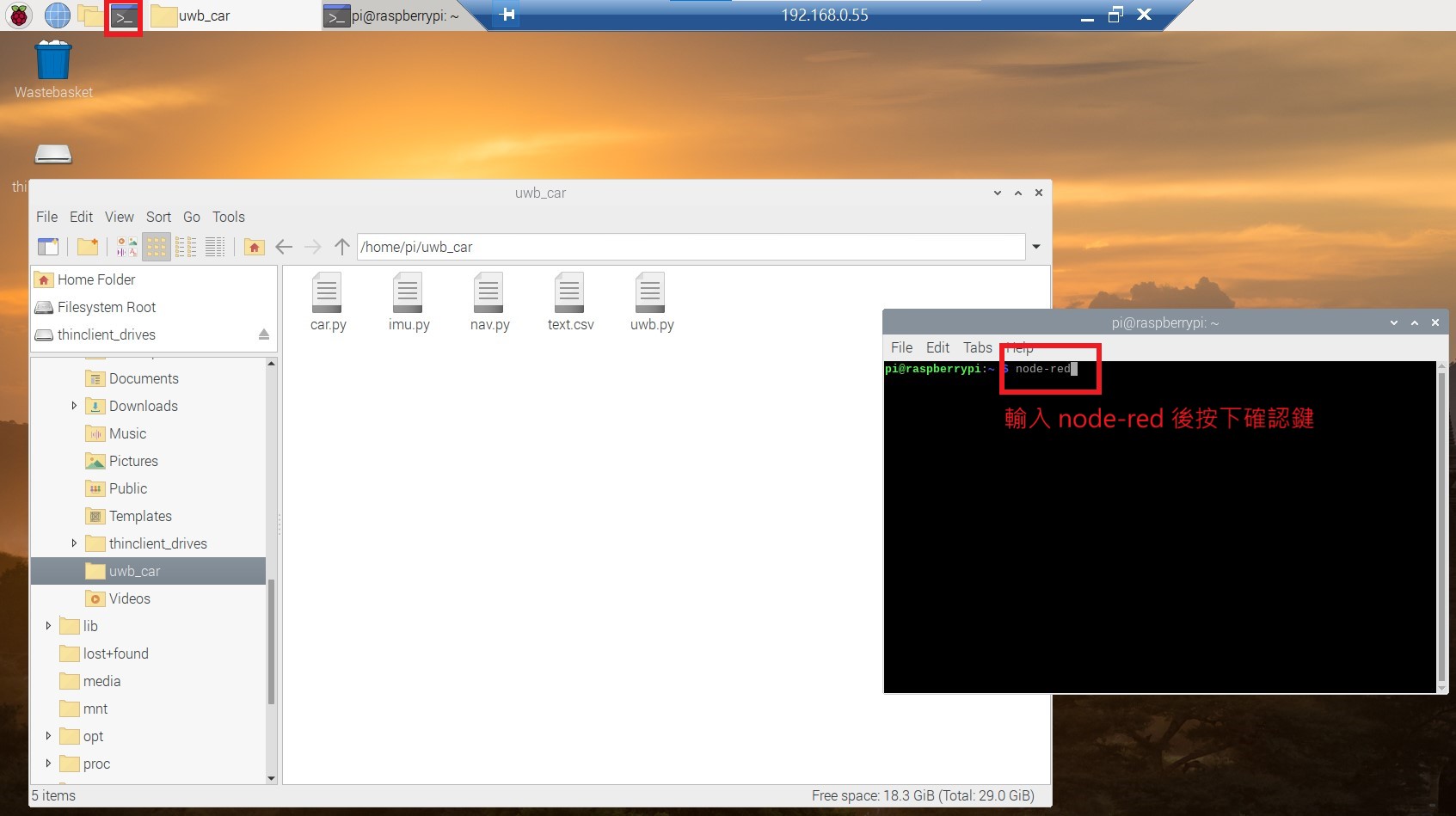
出現以下畫面代表成功
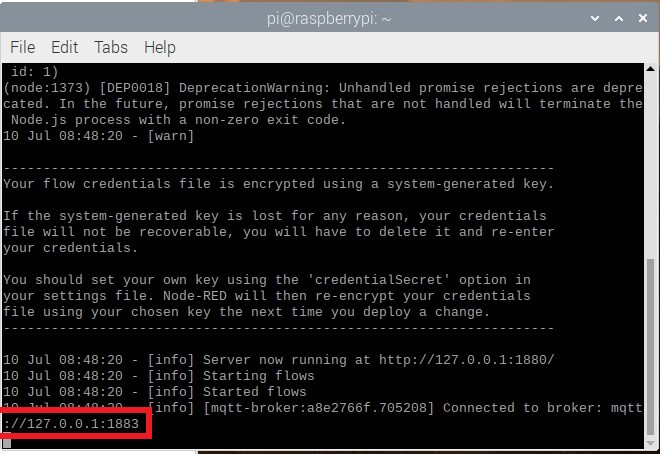
接下來確認手機WIFI、筆記型電腦WIFI連線與虛擬畫面的WIFI一致後,打開網頁輸入:192.168.0.55:1880/ui
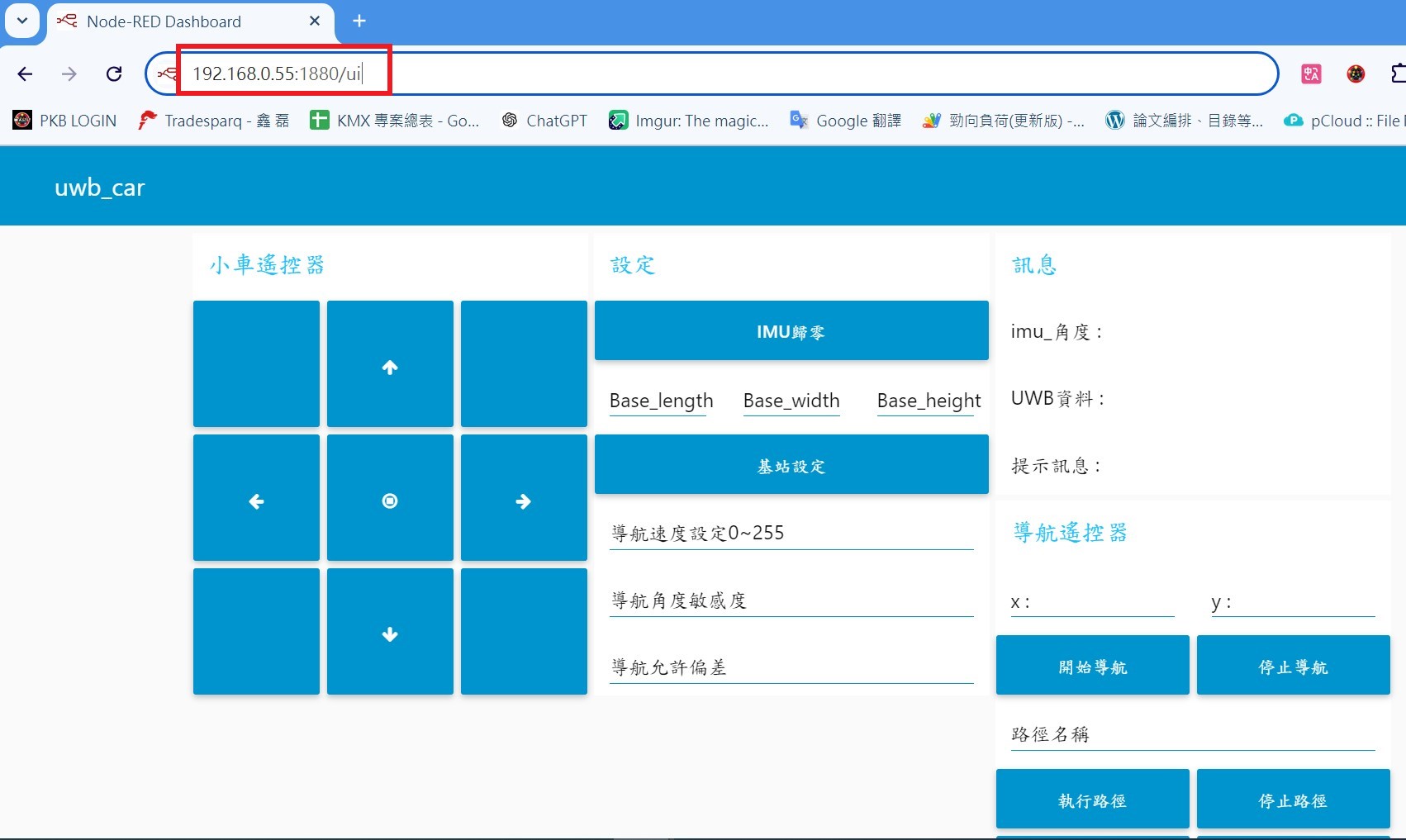
到這畫面並不代表可以控制車子,只是告訴你網頁介面可以開啟而已
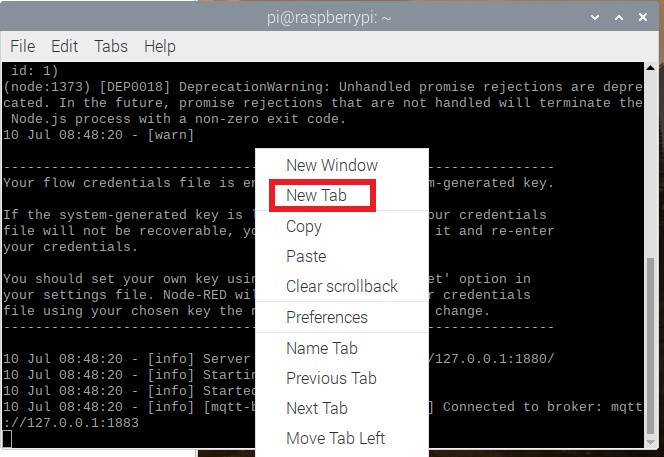
6.若假設不知道ip位置的話可以用以下方法查詢
在小黑窗的畫面上點選右鍵按下New Tab給他一個新的視窗並在新的視窗輸入ifconfig按下確認鍵
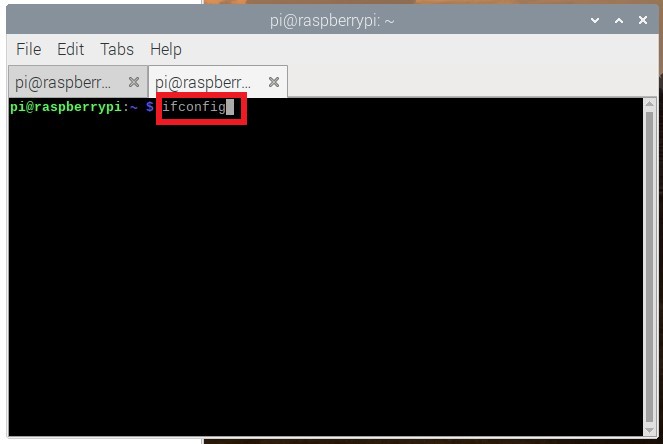
會跑出以下畫面分為兩個部分,第1個部分則是有線網路連接到車子上才會出現IP,第二個部分為無線網路的IP

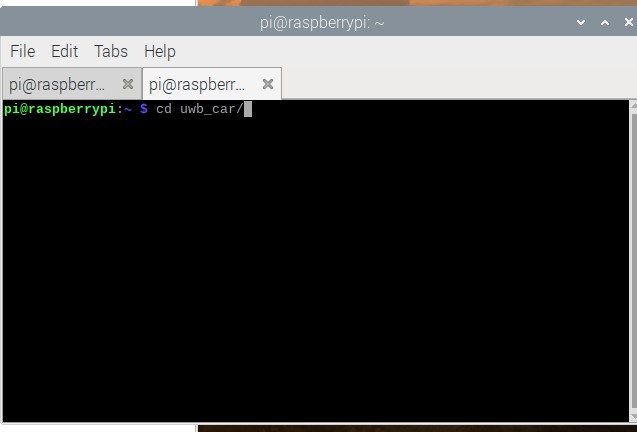
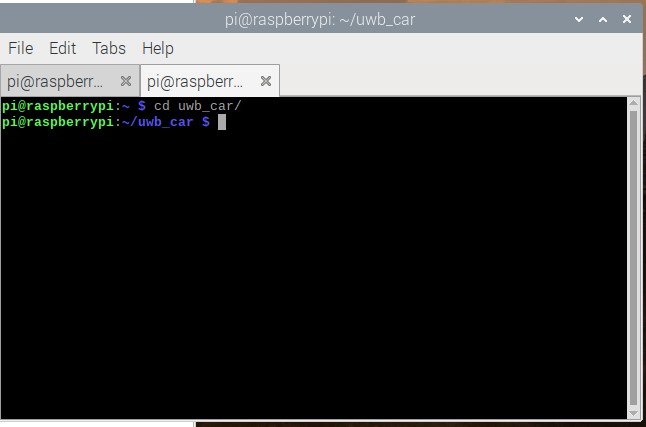
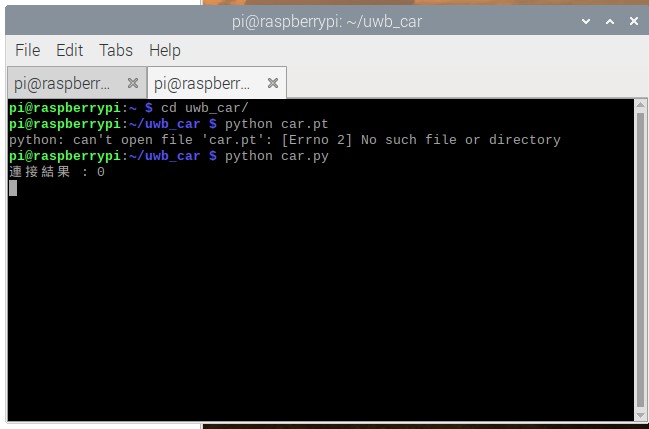
7.現在教你如何控制車子,還記得第4點開啟資料夾裡面有4個python(.py)的檔案嗎?,利用小黑窗執行他們先小黑窗的畫面上點選右鍵按下New Tab給他一個新的視窗並在新的視窗輸入cd uwb_car/ 按下確認鍵,成功後會像第2張圖一樣,這個用意是我的小黑窗會在這個路徑裡面執行我的四個py檔案
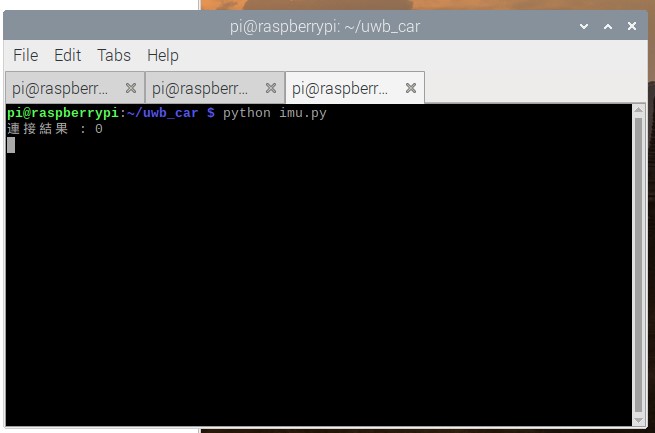
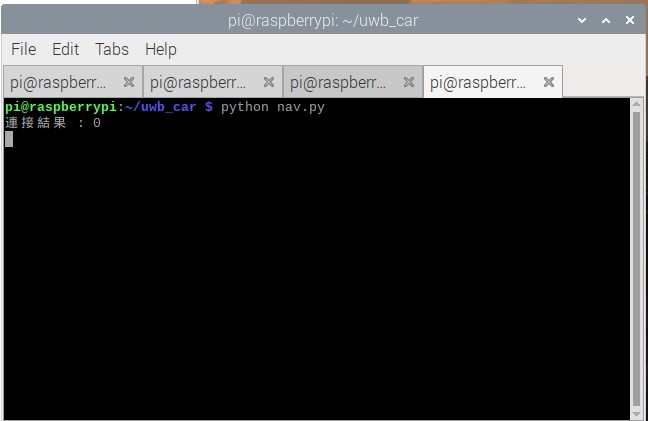
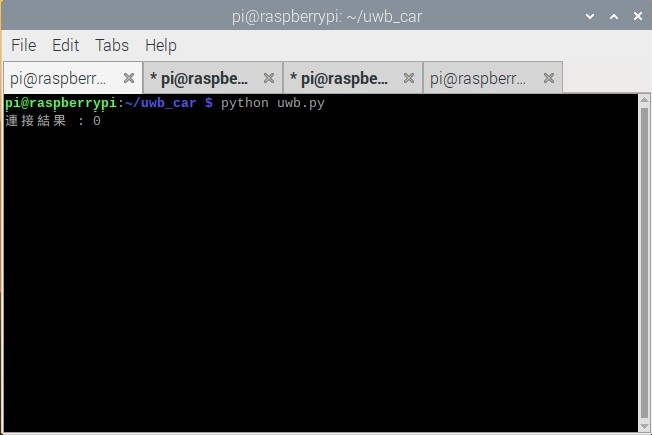
開始執行四個程式碼輸入第一個python car.py 之後後面3個都必須點選右鍵按下New Tab在新的視窗執行python imu.py、python nav.py、python uwb.py,成功的話會顯示連接結果:0
程式碼功能如下:
- python car.py (控制車子)
- python imu.py (針對車子的偏移,角度數據,讀取uwb檔案座標)
- python nav.py (導航功能.導航控制,目標座標設定,錄製路徑,執行)
- python uwb.py (4根基站的數據及座標)
- 車子上的USB與4跟基座上的USB都要插入, uwb.py才可以執行成功
都成功之後就可以在網頁上控制車子了

- 在使用導航定點控制時請記得一定要長,寬,高的數值一定要輸入,不然車子會找不到座標。
- 在使用Imu歸零的時候記得請把車尾的方向朝向後方

操作流程sop在第1頁
基站放置教學在第2頁
操作日誌在第3頁
無人車進度階段在第4頁
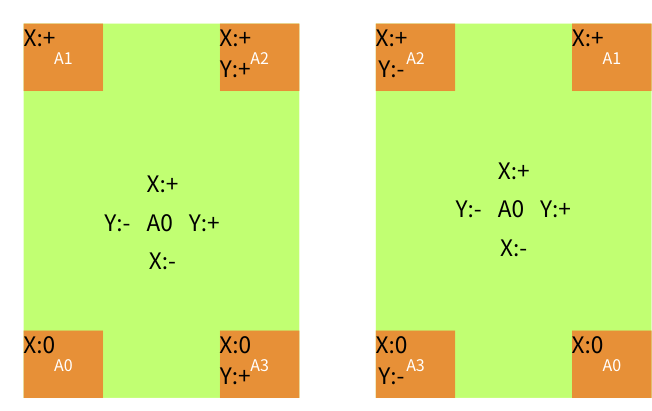
基站架設篇
T1 無人車基站電控板插入無人車USB位置
A0~3 為機站電控板插入基站的USB位置
將基站架設四方型順序為以下兩種方式以
A0為起點按照順序放置A0~A4,A1左邊是A2 Y為負數,A1右邊是A2 Y為正數
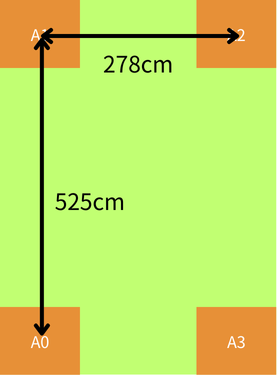
量測方式為如下圖
目前預設為:
長:525cm
寬:278cm
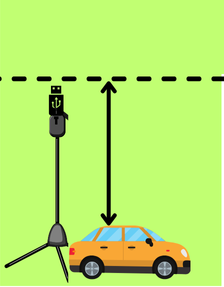
高:72cm
操作流程sop在第1頁
基站放置教學在第2頁
操作日誌在第3頁
無人車進度階段在第4頁
2024/08/29 基站放置位子調整
廠商建議:基站的架設構型長寬比不得超過2:1 ; 建議採用1:1 的構型。 目前已經接近3:1, 誤差會放大。
經我自己測試結果發現跟構型沒啥關西。
2024/08/28 廠商出建議、下個階段製作及我們平坦面測試
廠商建議:
1.他們在正常的地面上測試進度在兩三公分以內都沒有問題,在草地上的話車子的性能必須要提高譬如說他必須要有速度控制的能力也就是要閉迴路的功能。
2.下個階段想要做的是增加測距的sensor,可以做到偵測障礙物以及閃躲
3.把車子送回廠商加裝避障的感測器,並且繼續進行從障礙物中閃躲後可以追擊到目標的這個情境。
4.電量便低誤差越大 屬於車子動力問題 調整車速與角度敏感度可以解決
5.實坐標 與 uwb坐標 不重合 導致有固定偏差
------------------------------------------------------------------------------------------------------------------------------------------------------
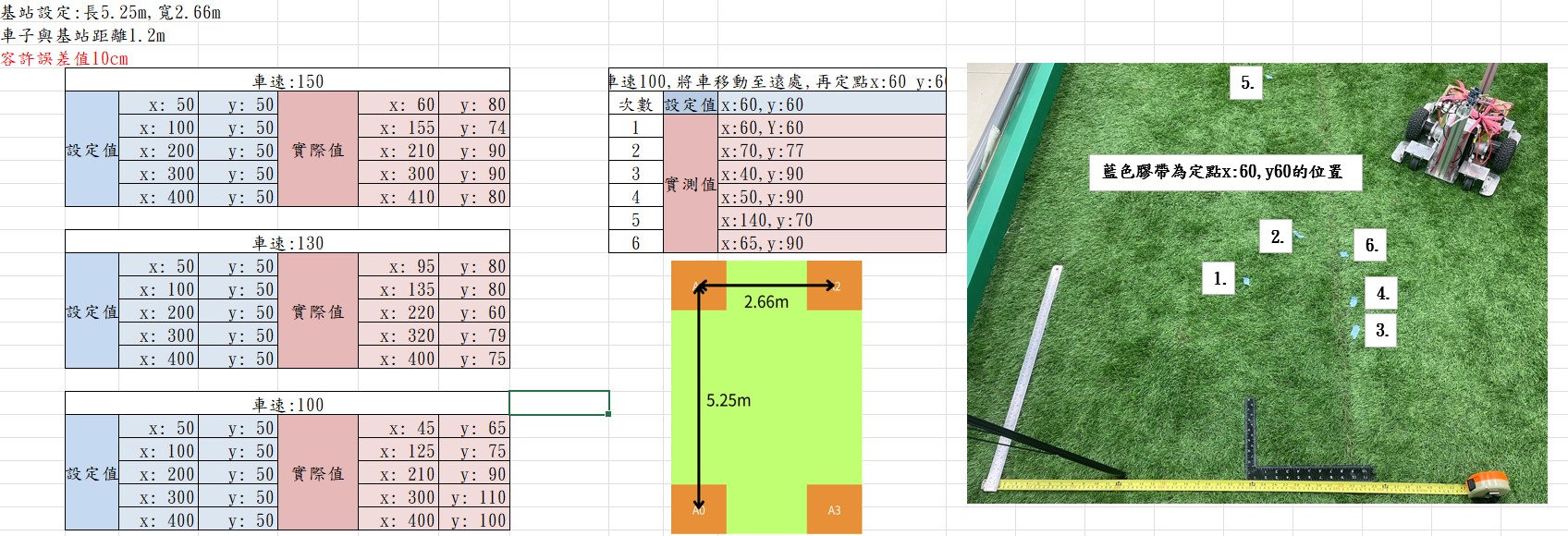
平坦地面進行測試結果如下:
2024/08/27 演算法更新
經試來回定點後,來回定點準確度提升
經過2天測試發現問題:
一、 電池的剩餘電量會影響準確度
1、滿電量13.4V時精度很高
2、12.8V開始偶爾出現定點不到位有些誤差
3、12.69V開始不穩定
4、12.5V位置偏差增多
二、距離越遠準確度越低
最大距離525cm
1、X:0至X:50 準確度高 6、X:0至X:300 偏差10cm
2、X:0至X:100 準確度高 7、X:0至X:350 偏差15-20cm
3、X:0至X:150 準確度高 8、X:0至X:400 偏差20-30cm
4、X:0至X:200 準確度高 9、X:0至X:450 偏差25cm
5、X:0至X:250 偏差10cm 10、X:0至X:500 偏差28-30cm
2024/08/23 演算法更新
將演算法調整後與開發者遠端有明顯很大的改善,定位座標的準確度提高
2024/08/16 程式碼更新
經上次調整後開發者遠端操控查詢問題原因,發現似乎溝演算法有關西並需要重新編寫。
2024/07/26 使用新程式碼執行
開發人員給新的程式碼執行,經測試後,跟之前的並沒有太大差異
2024/07/18 導航系統誤差值過大
已將誤差值數據回饋於作者
作者回饋:因人工草地上的摩擦力與一般地面大不相同, 至於運動參數的調適會再重新調整。
2024/07/16 導航系統無作用(已解決)
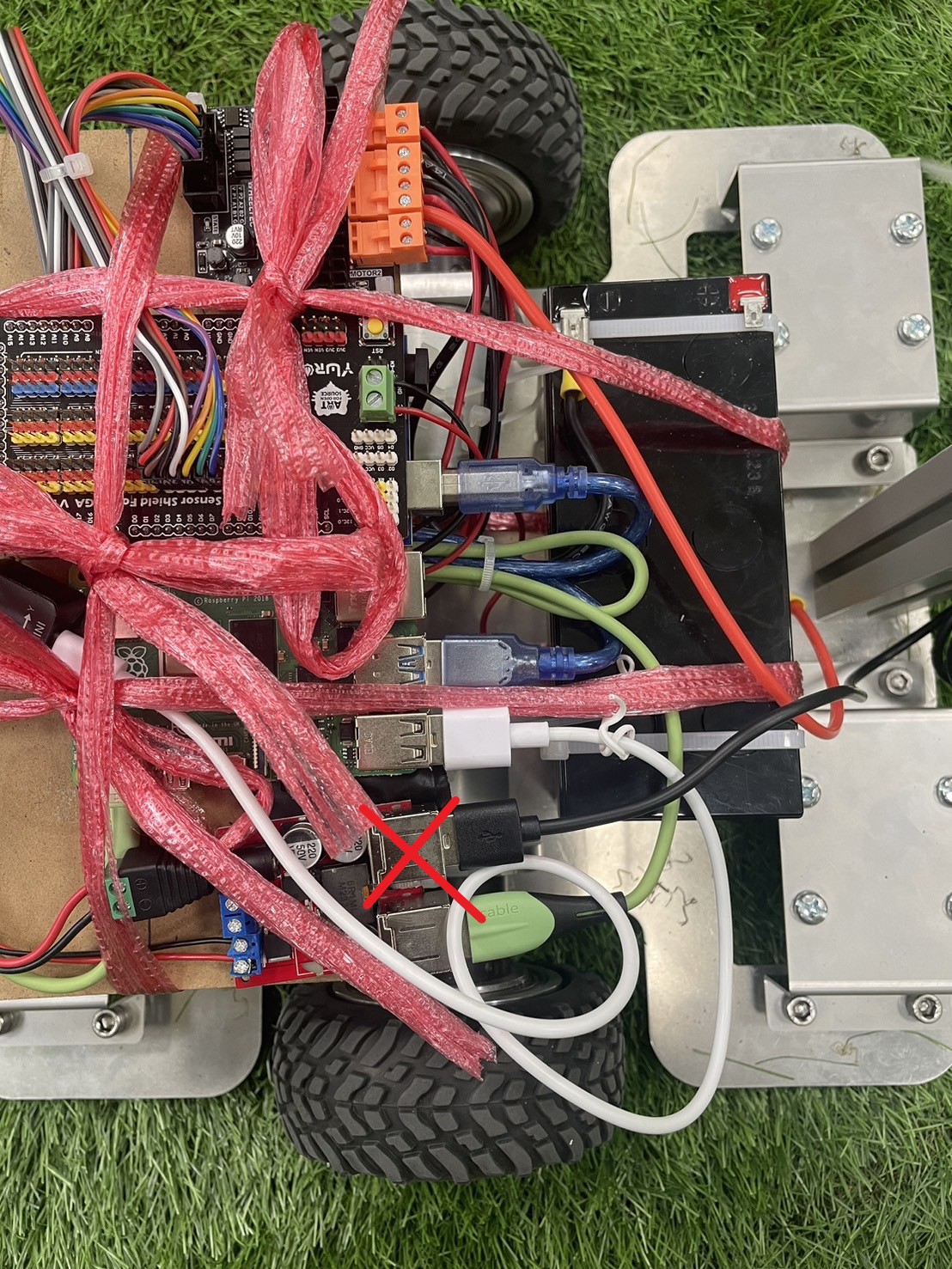
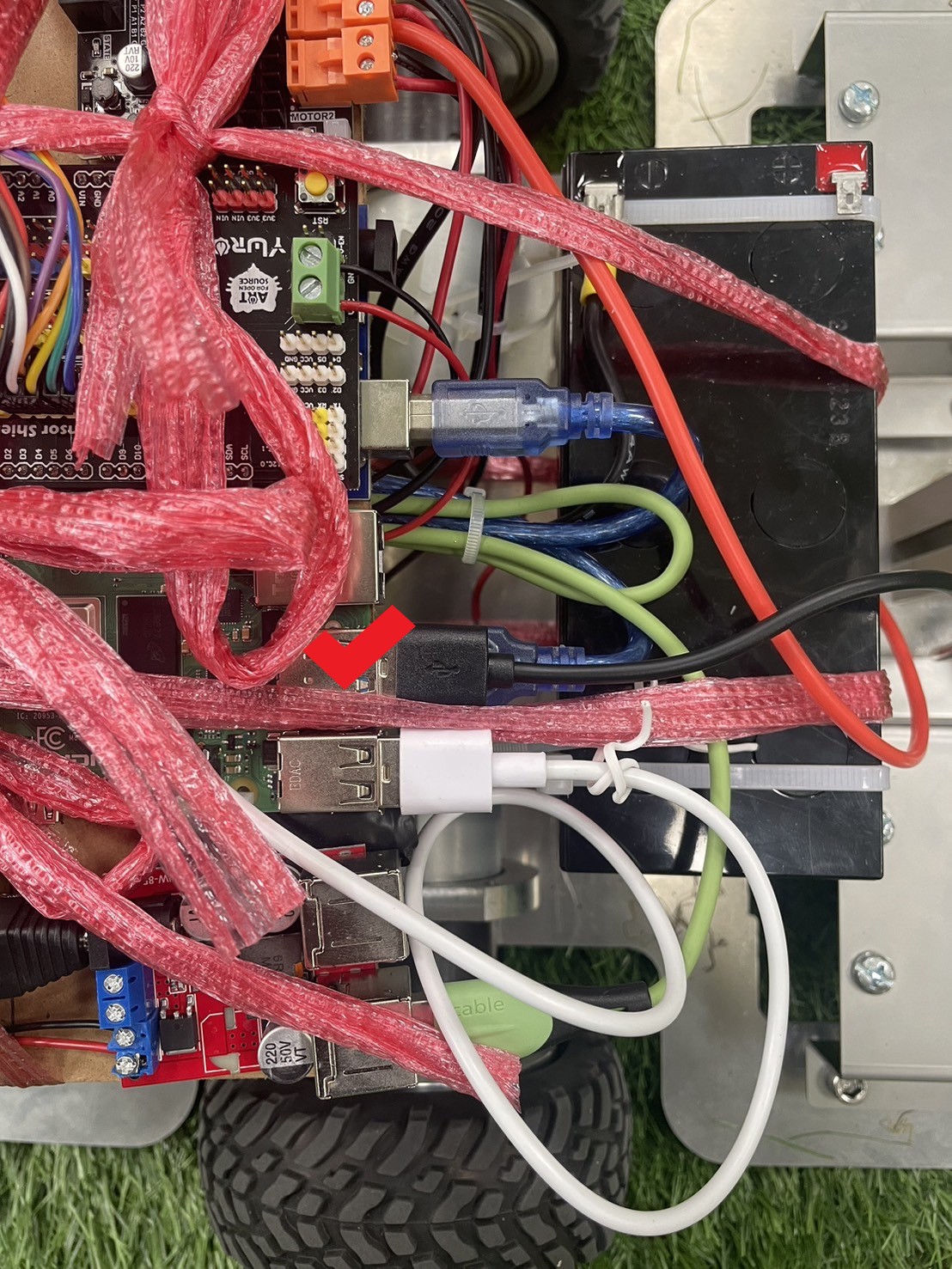
產線人員將導航usb插錯插槽,錯誤的圖示插槽為電源供應,正確圖示為軟體的插槽
2024/07/11 測試運作-硬體
操作流程sop在第1頁
基站放置教學在第2頁
操作日誌在第3頁
無人車進度階段在第4頁
第一階段製作可移動的無人車(已完成)
第二階段座標定點移動(待完成)
第三階段安裝避障功能,能自動閃避障礙物
第四階段無人機跟隨無人車
第五階段無人機跟隨後可停到無人車上
第六階段無人車、無人機可互相溝通
