異常分析-80-A164-002
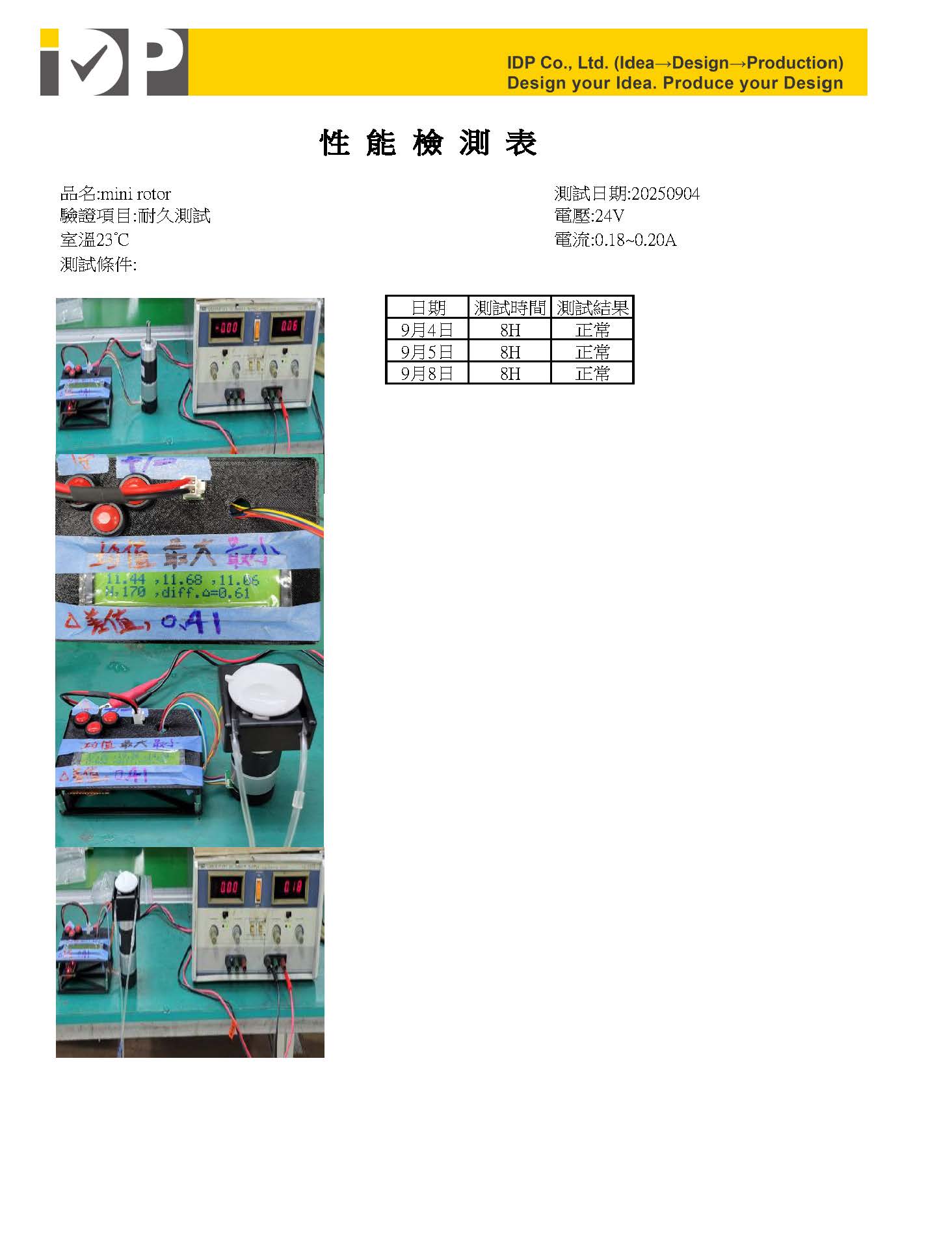
一、異常說明:使用後會有干涉卡頓情況。
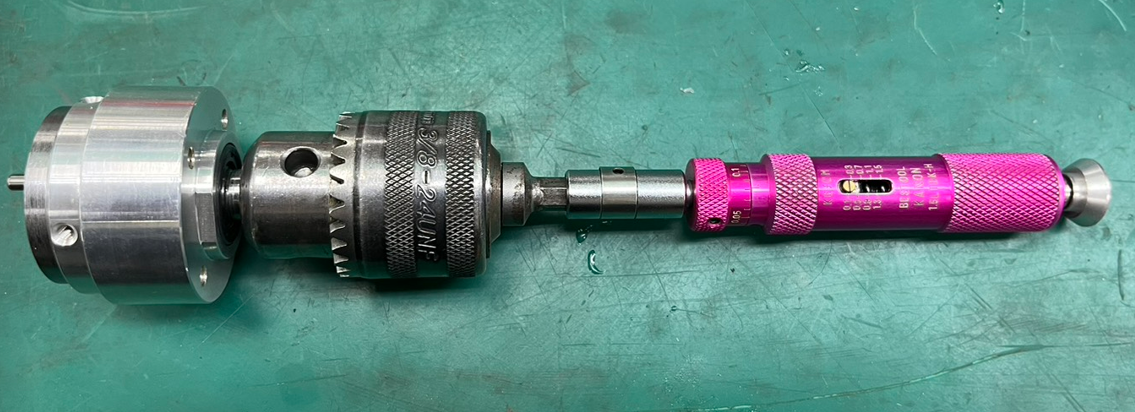
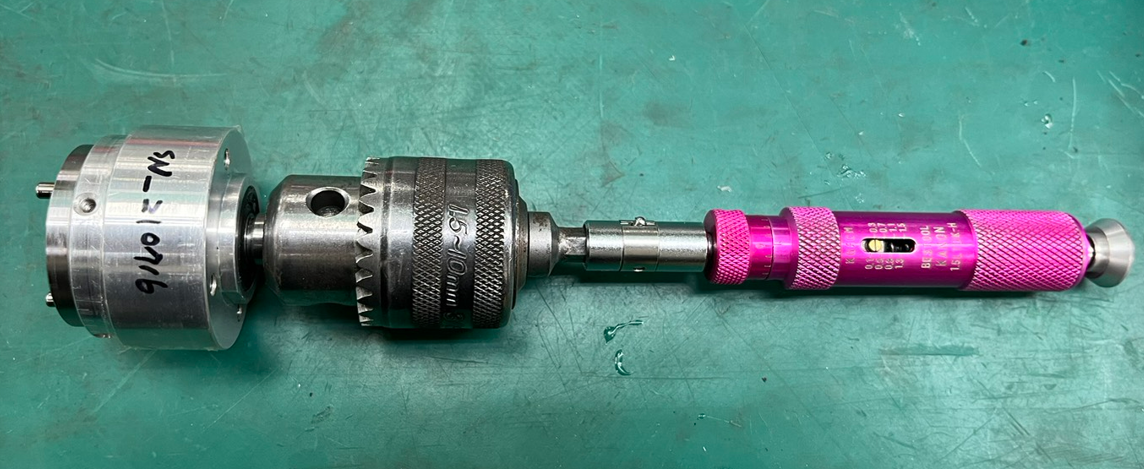
二、異常分析:輸出軸心啟動扭矩尺寸比較。

|
尺寸mm |
啟動扭矩kgf.cm |
|
Ø9.98~9.96mm |
0.37 |
|
Ø9.96~9.93mm |
0.25 |
|
尺寸Ø9.96~9.93mm |
啟動扭矩kgf.cm |
|
有彈簧 |
0.25 |
|
無彈簧 |
0.19 |
三、結論:
1.比較分析後改小輸出軸心尺寸可降低啟動扭矩,進而減少使用後會有干涉卡頓情況。
2.研發已於20250901完成輸出軸心相關尺寸修改。


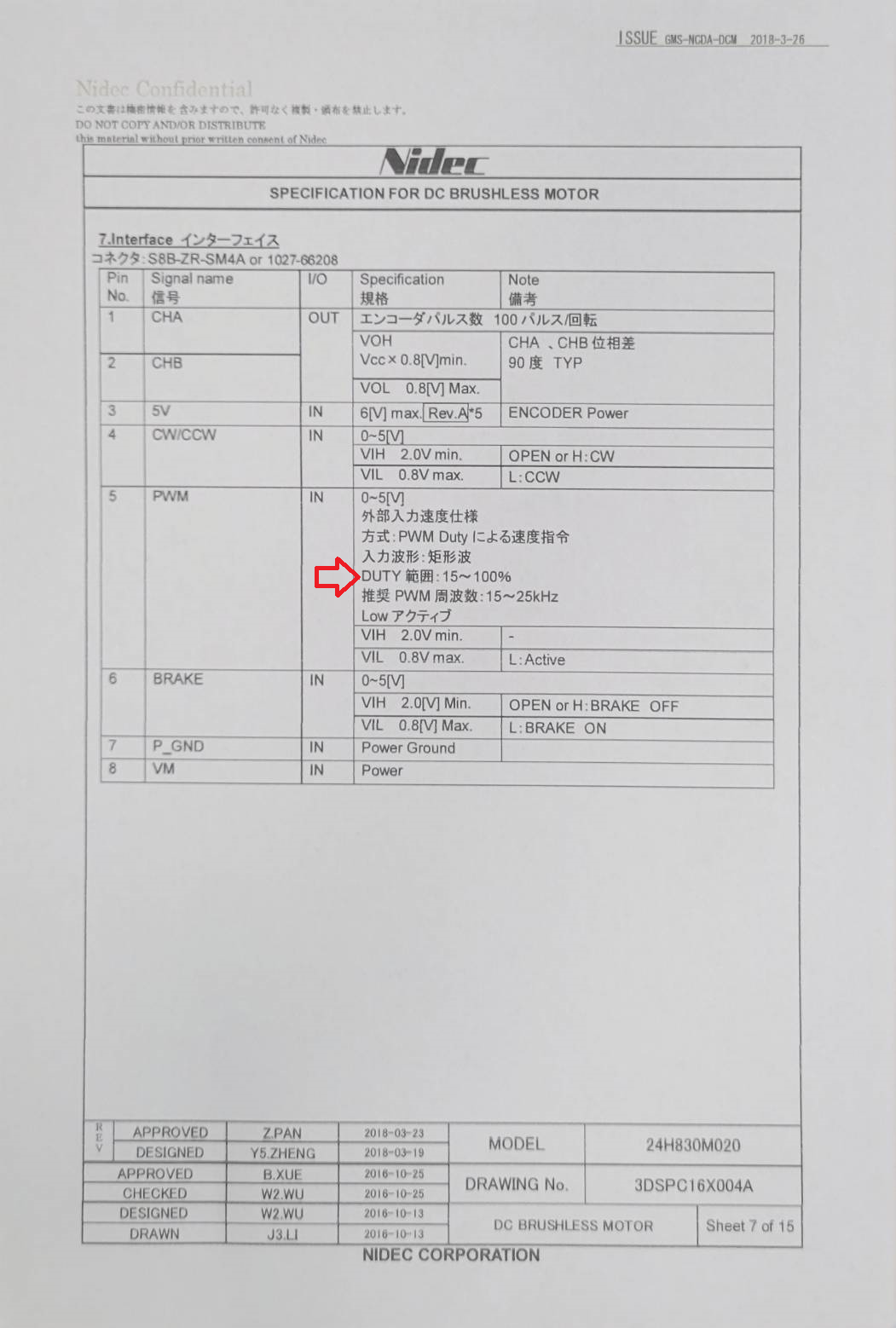
20250903更新DUTY範圍影響
客用馬達控制器規格

控制器DUTY範圍7%
馬達的DUTY適用範圍15%
相關說明:
一、DUTY是什麼?
DUTY(Duty Cycle,佔空比)是用在PWM(Pulse Width Modulation,脈寬調變)控制中的一個關鍵參數。它指的是:
一個PWM週期中,訊號為高電平的時間佔整個週期的百分比。
舉例來說:
- 如果DUTY為100%,表示輸出一直是高電平(等於直流電)。
- 如果DUTY為50%,表示一半時間為高電平,一半為低電平。
- 如果DUTY為0%,則完全沒有輸出(全為低電平)。
在馬達控制中,DUTY通常用來控制馬達的轉速或力矩。DUTY越高,馬達的驅動電壓平均值越高,轉速/力矩通常也越大。
二、情境分析:馬達DUTY需求 vs 控制器輸出
➤ 馬達需求:DUTY範圍 15% ~ 100%
這表示馬達只有在PWM佔空比超過15%時,才會有穩定/正常的啟動與運轉。
➤ 控制器輸出:DUTY範圍 7%
代表這個控制器只輸出7%的PWM佔空比。
三、不相符的後果是什麼?
若控制器輸出的DUTY範圍只有7%,而馬達至少需要15%,會有以下問題:
|
問題 |
說明 |
|
馬達無法啟動 |
7% 的PWM太低,馬達可能連啟動的力矩都不夠。會處於「抖動」或「卡住」狀態。 |
|
馬達過熱風險 |
長期在低頻低DUTY的狀態下輸出,馬達可能會產生電流突波,導致過熱。 |
|
控制失效 |
若控制器永遠輸出低於15%,馬達就等於完全無法有效工作。 |
|
系統錯誤 |
有些驅動系統會檢查馬達並回報錯誤或進入保護模式。 |
四、正確設計的做法?
- 選用DUTY範圍符合馬達需求的控制器
- 若馬達需要15~100%,控制器必須能輸出至少15%以上的PWM。
- 加設最低DUTY限制
- 控制程式中加入最小DUTY限制(如15%),避免送出低於馬達可接受範圍的指令。
- 使用電壓線性轉換(如DAC)前的對應
- 確保從電壓/數位訊號轉成PWM的範圍符合馬達的工作特性。
補充:為什麼馬達需符合DUTY範圍運行?
這與馬達的起動電壓、摩擦力、負載慣性等物理條件有關。DUTY太低時,平均電壓太小,不足以克服靜態摩擦與負載啟動力矩,使馬達無法正常的順暢運轉。
鄭總解決問題方案
https://walex.io/captainslog/page.php?id=10096