114.07.24
60框閉環剎車步進馬達LINK
114.07.11
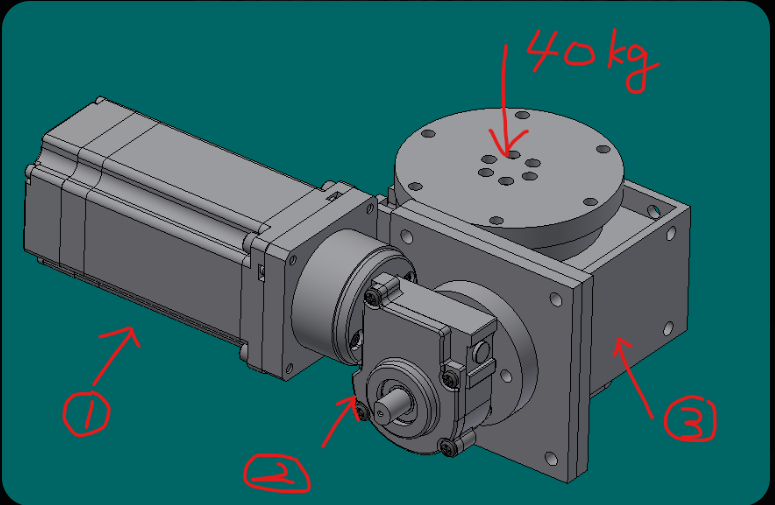
載台負載運轉計算
| 項目 | 數值 |
|---|---|
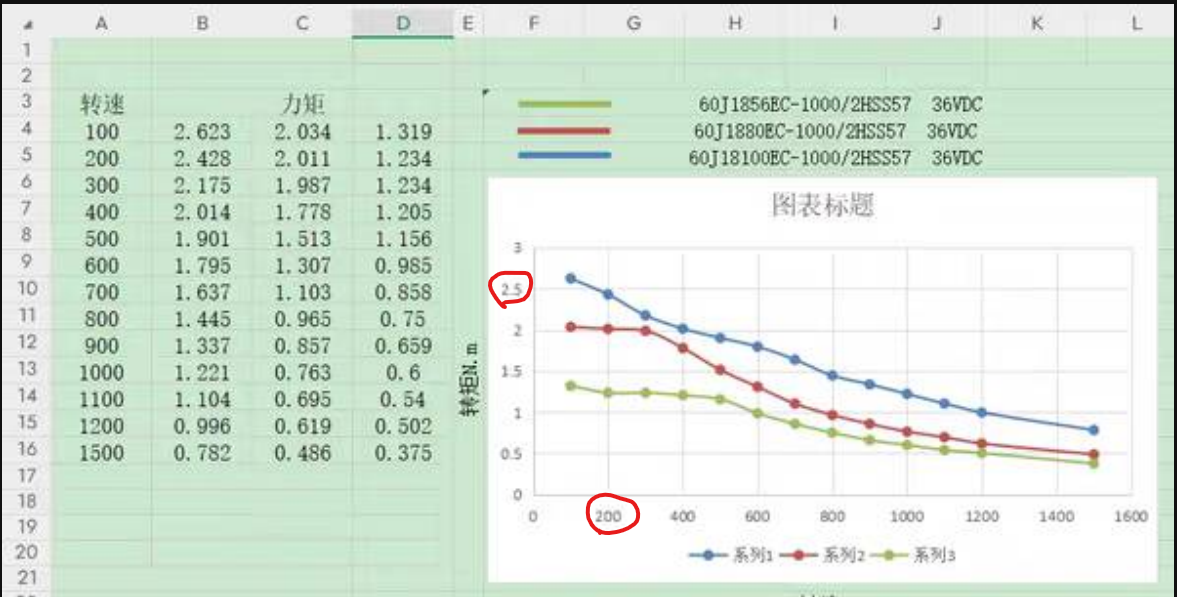
| 馬達額定扭矩 | 2.5 N·m |
| 馬達轉速 | 200 RPM |
| 蝸輪箱減速比 | 19.5:1 |
| 中空軸減速機減速比 | 40:1 |
| 總減速比 | 19.5 × 40 = 780:1 |
| 負載質量 | 40 kg |
| 作用半徑 | 45 mm = 0.045 m |
| 重力加速度 | 9.8 m/s² |
1. 負載靜態扭矩(轉動平台受到的重力負載)
2. 馬達經過減速後的輸出扭矩:
但考慮 傳動效率(主要是蝸輪蝸桿效率較低,估算 60% 整體效率):
最終結論:
| 項目 | 扭矩(N·m) |
|---|---|
| 負載需求 | 17.64 |
| 馬達有效輸出 | 1170 |
結論:馬達+減速系統能輕鬆轉動此40kg轉台。
即使考慮啟動慣性與傳動效率,也非常充足,系統設計安全性高。
114.06.18
A346
杰美康機電步進馬達link
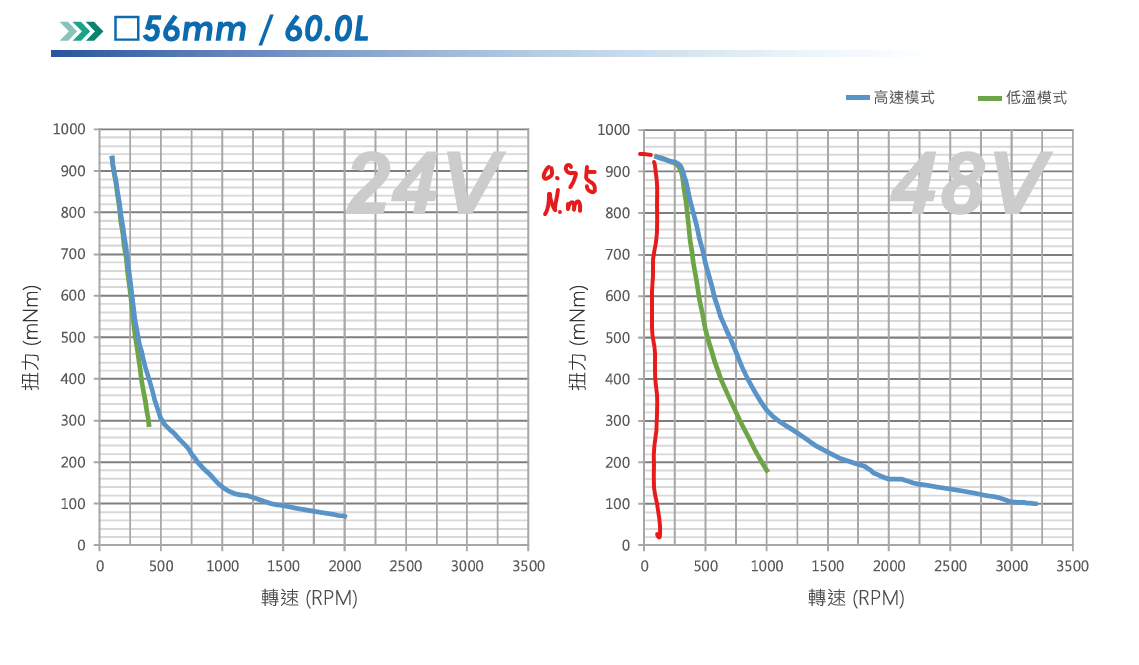
60J18100EC-1000-LS,供電36VDC,轉速200RPM,扭力約2.5N.m
友創伺服步進馬達,供電48VDC,轉速200RPM,扭力約0.95N.mlink
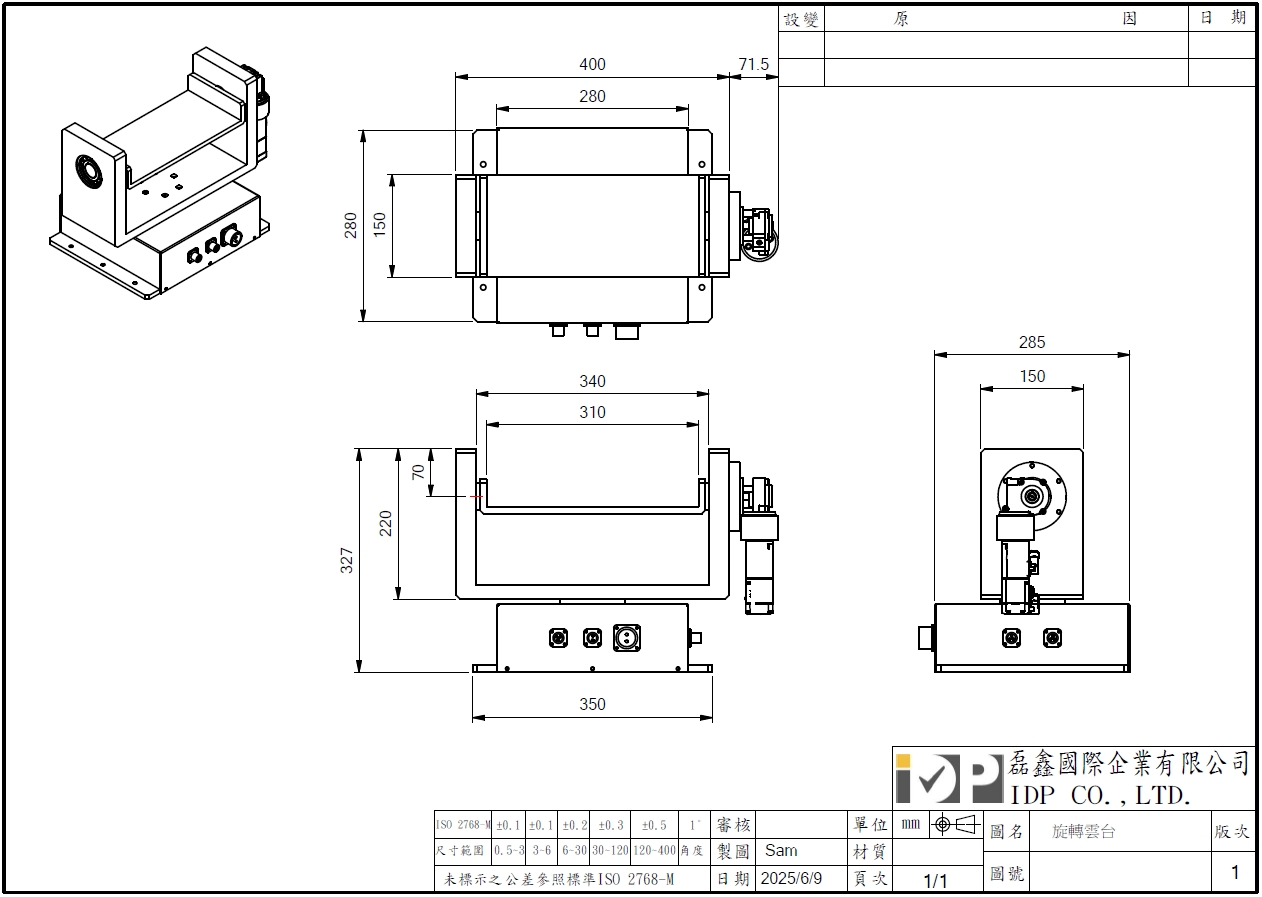
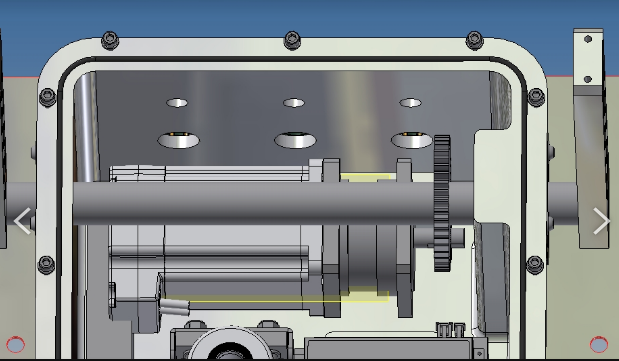
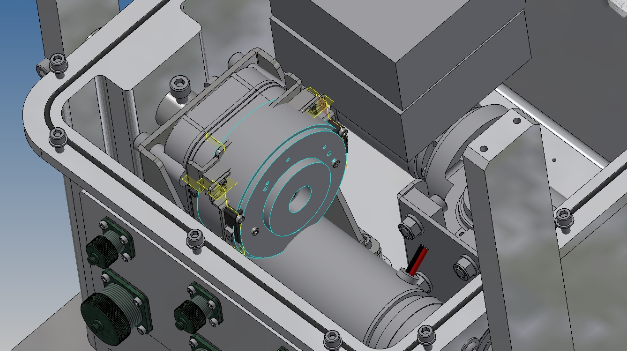
旋轉雲台
114.06.11
旋轉雲台
旋轉雲台動畫link

114.06.16
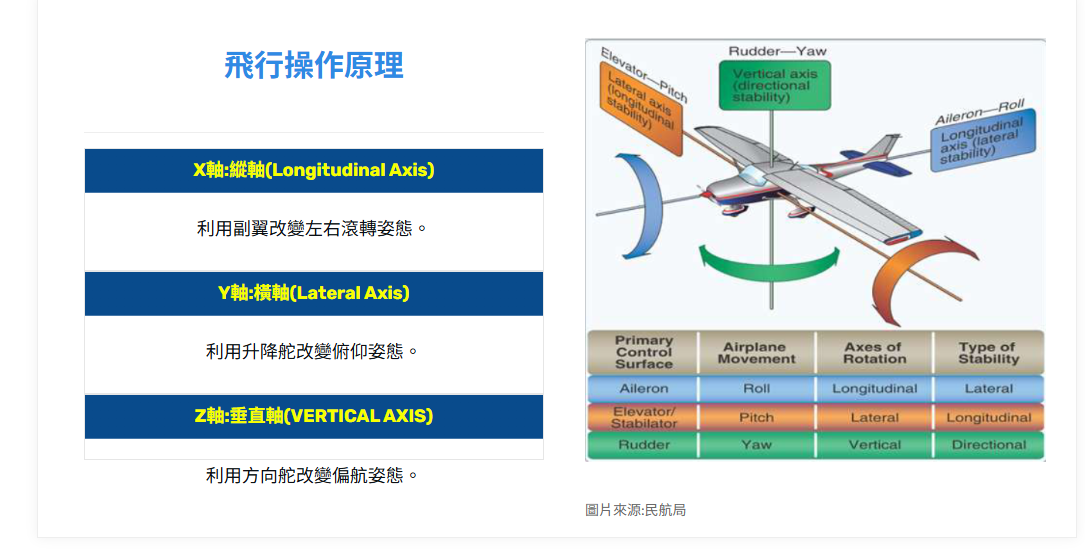
使用者操作介面示意圖
ChatGPT 生成範例圖

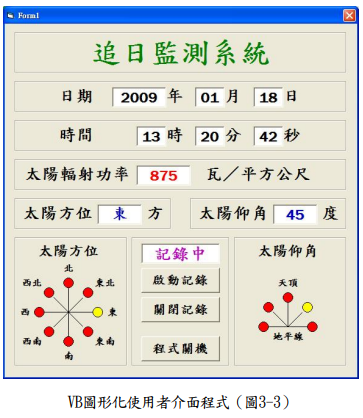
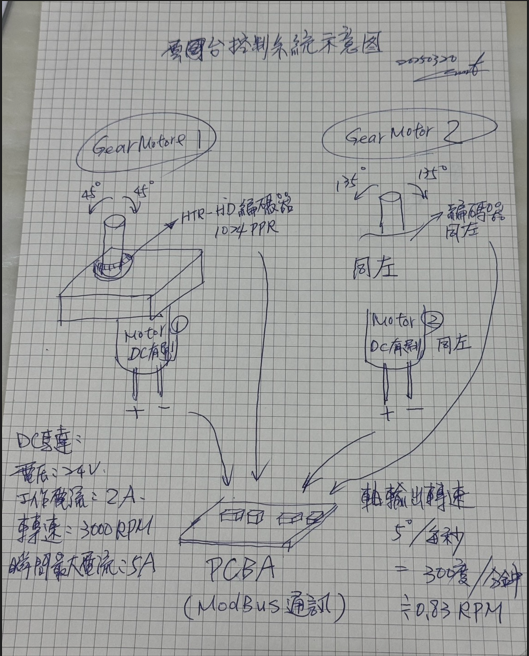
追日系統 一般操作距離


1步進馬達扭力計算
2步進馬達評估選型
3有刷馬達評估選型



有刷馬達評估選型
1.DC有刷+300比減速機
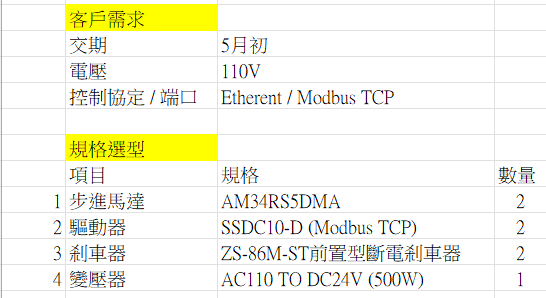
2.電壓:100V
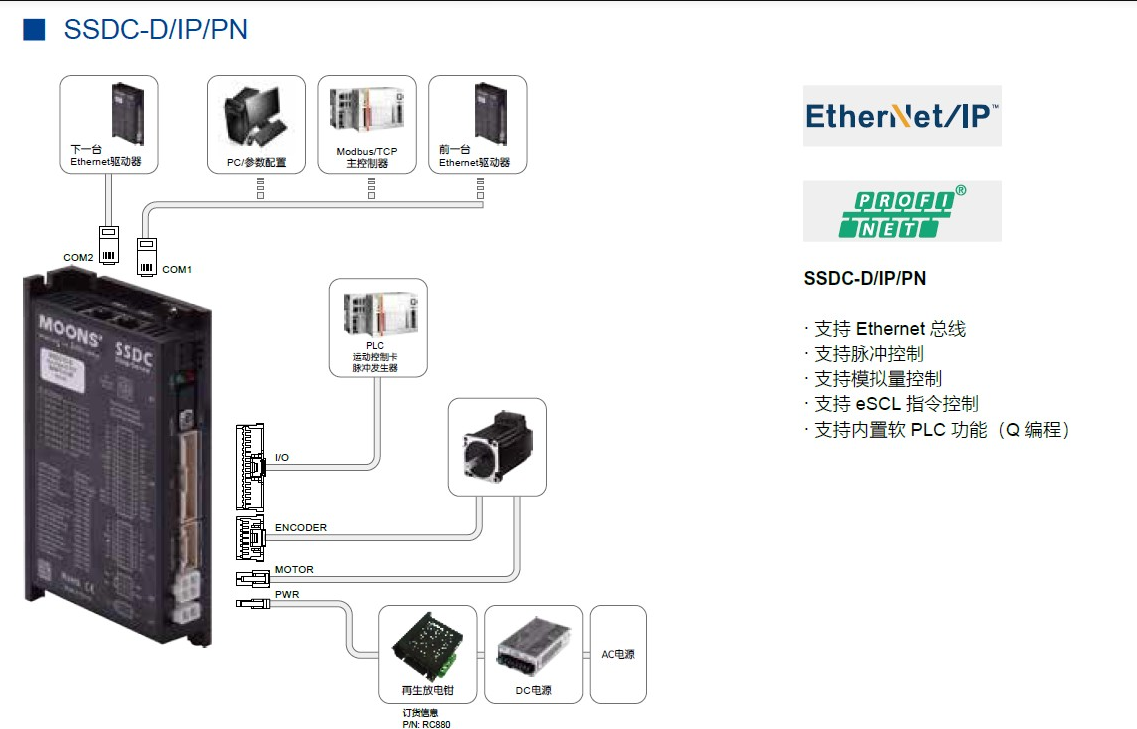
3.控制協定/端口:Ethernet /Modbus TCP
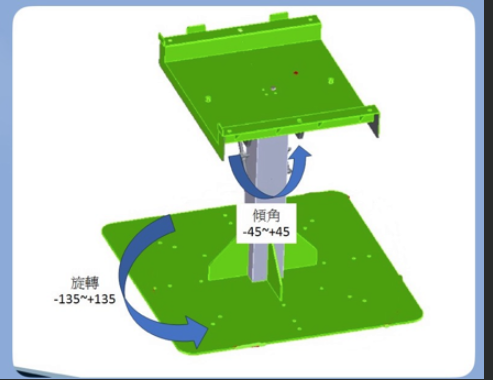
4.角度有2種,包括:水平及垂直
+-45度
+-135度
5. 軸輸出轉速
5度/秒 = 300度/分鐘
約0.83RPM

編碼器
1. 鴻璿/HTR-HD

2. 迦南通信8.A020

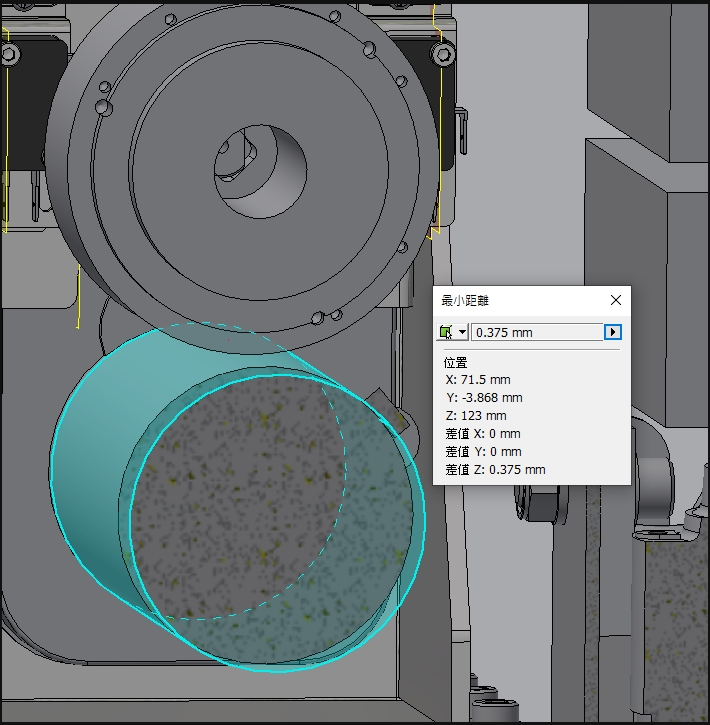
外徑100mm 干涉
3. Autonics旋轉編碼器 創巨科技 E80H30-3200-6-L-5
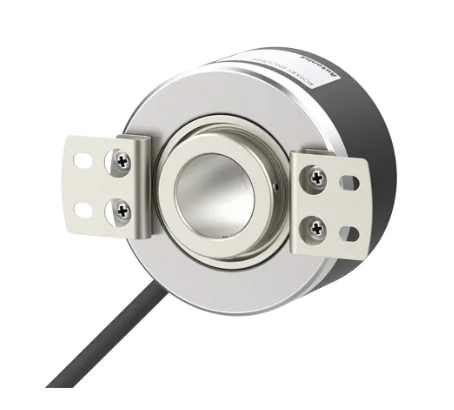
外徑80mm ok
控制器
1. 一控2控制板
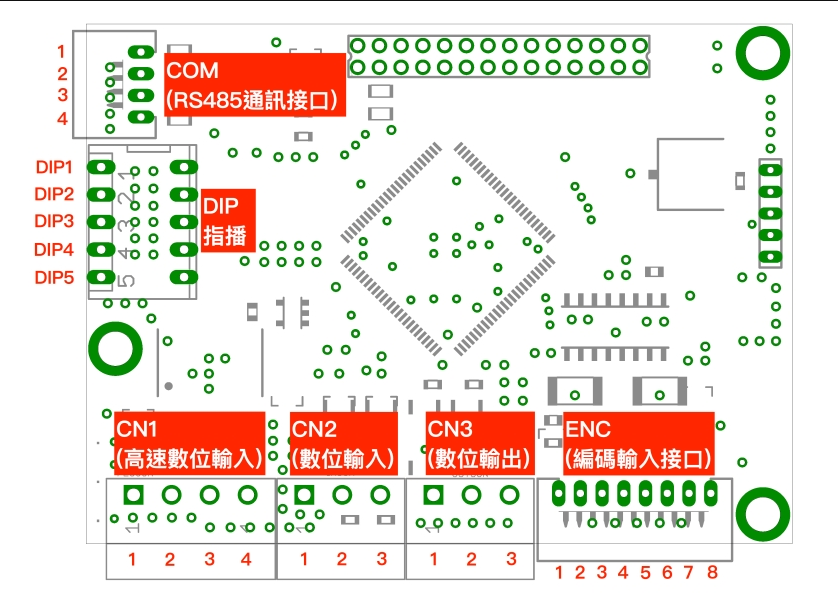
2. 多功能智慧控制器

板子:一控1
建議編碼器需2500PPR
