A342
EKB-伺服壓床(智慧化齒輪壓合系統)紀錄LINK
工研院-IDP-齒輪數據初步繪製LINK
工研院-IDP-騰網齒輪數據模型報告LINK
工研院-IDP-騰網齒輪數據模型報告-02LINK
115.02.04
115..02.01
115.01.22

114.11.13
114.10.09
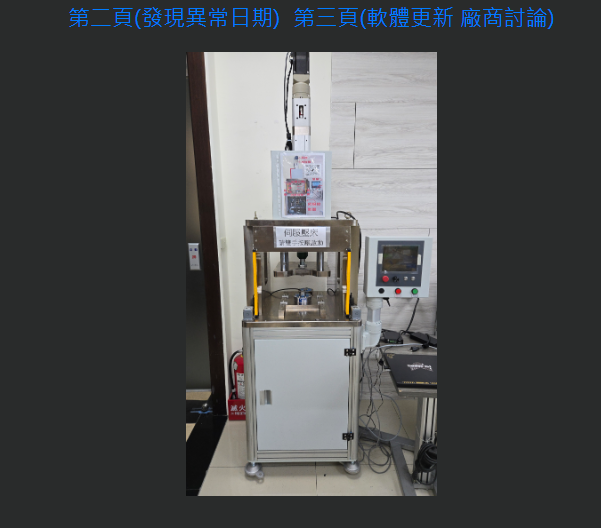
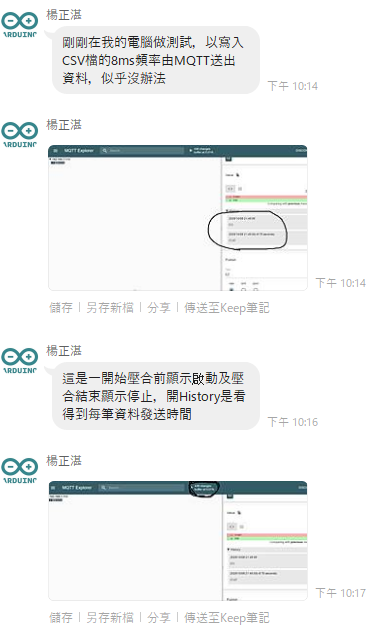
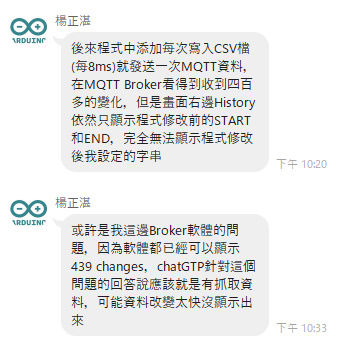
MQTT 資料顯示異常說明
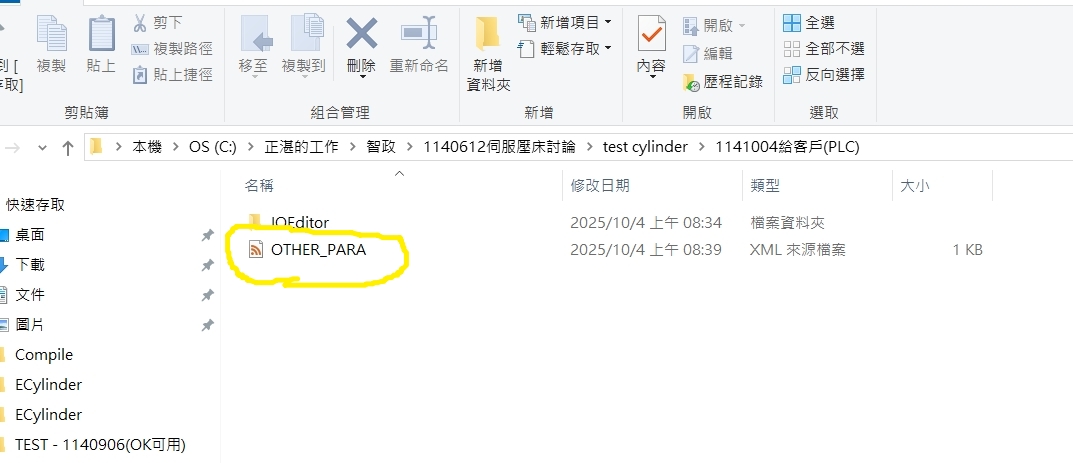
114.10.04

114.10.01
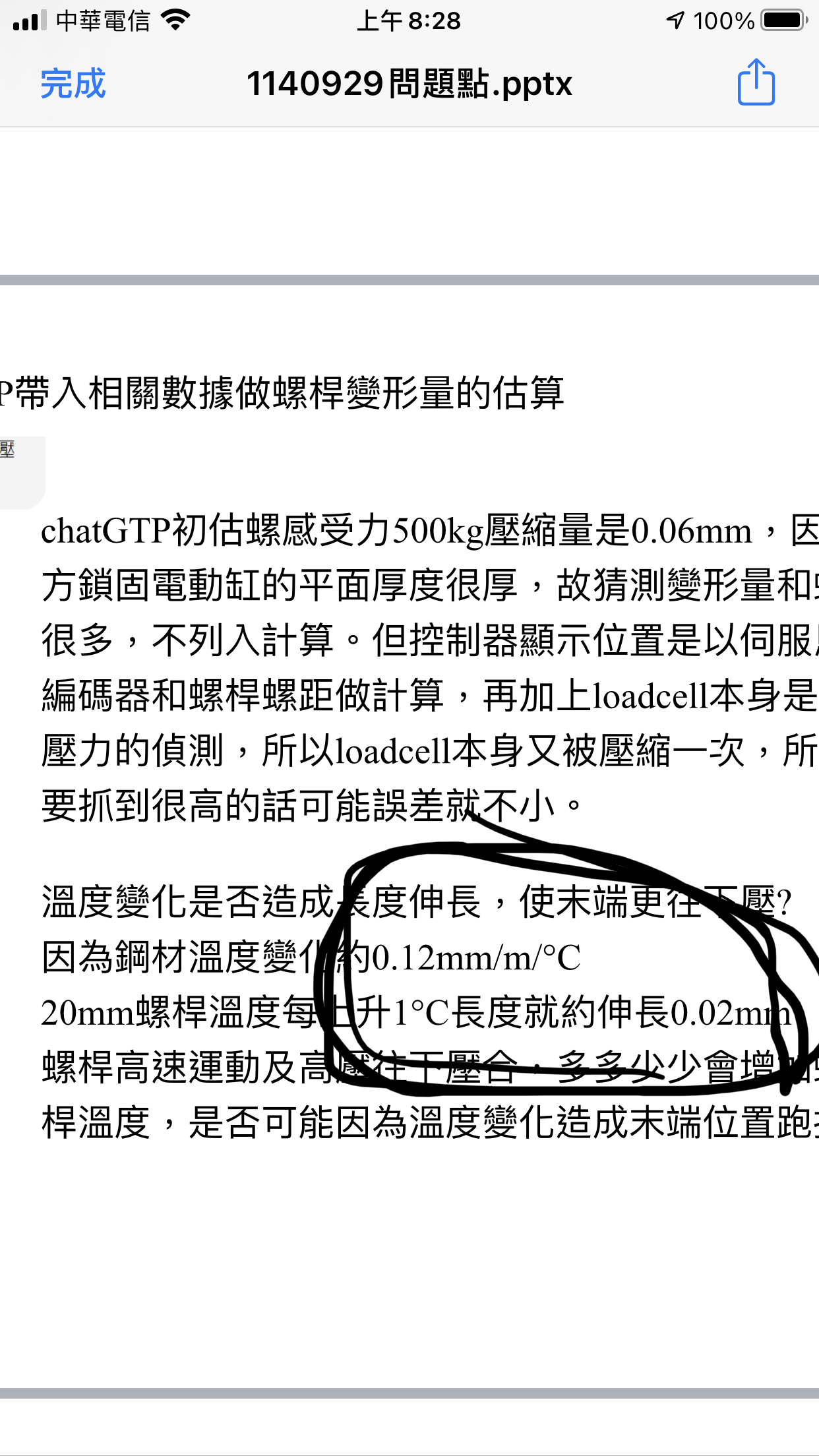
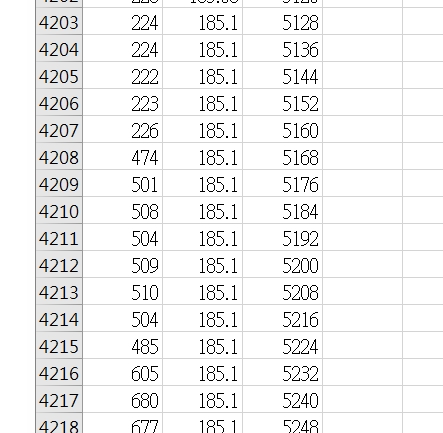
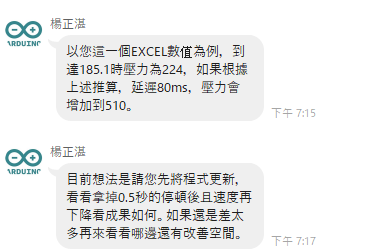
打錯,少打一個0,是0.012/mm/度c和200mm每度伸長0.002mm

114.09.30
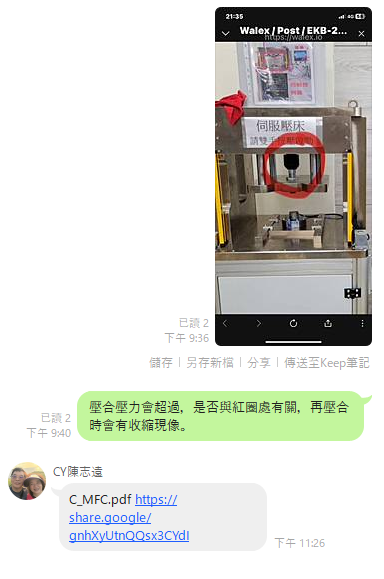
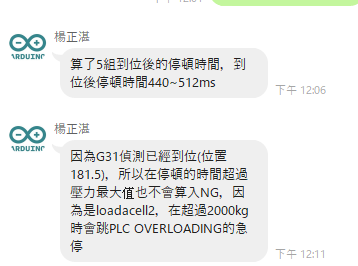
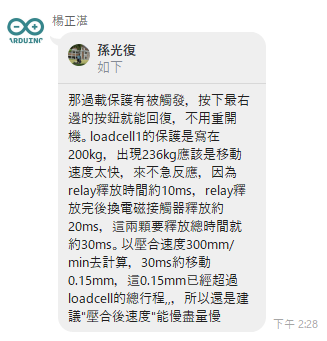
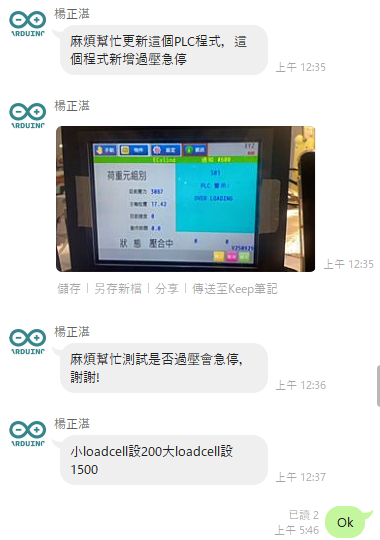
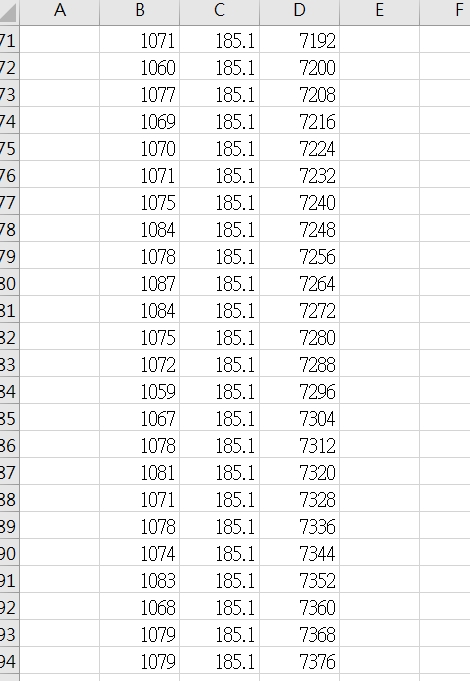
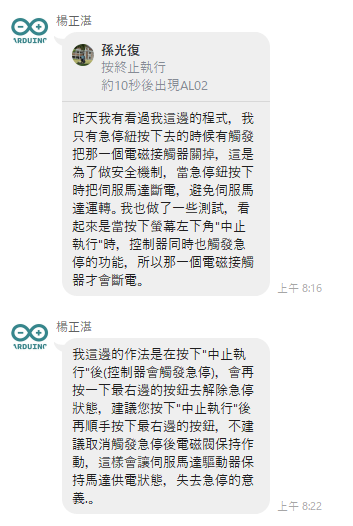
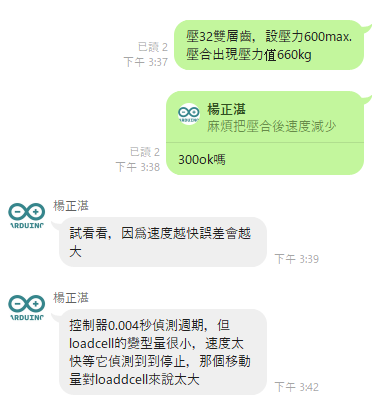
過壓急停

114.09.26
114.09.25

因為控制器開機時間多於驅動器等待時間,所以驅動器等不到訊號就先跳alarm訊號,待開機完驅動器讀到訊後就跳AL - -

按終止執行約10秒後出現AL02
114.09.23
114.09.18
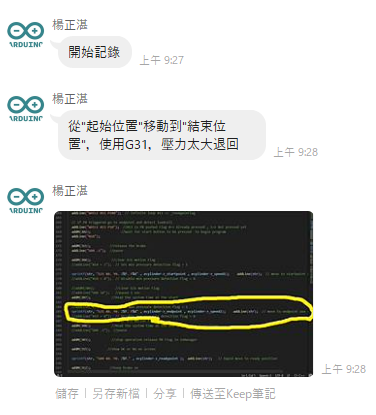
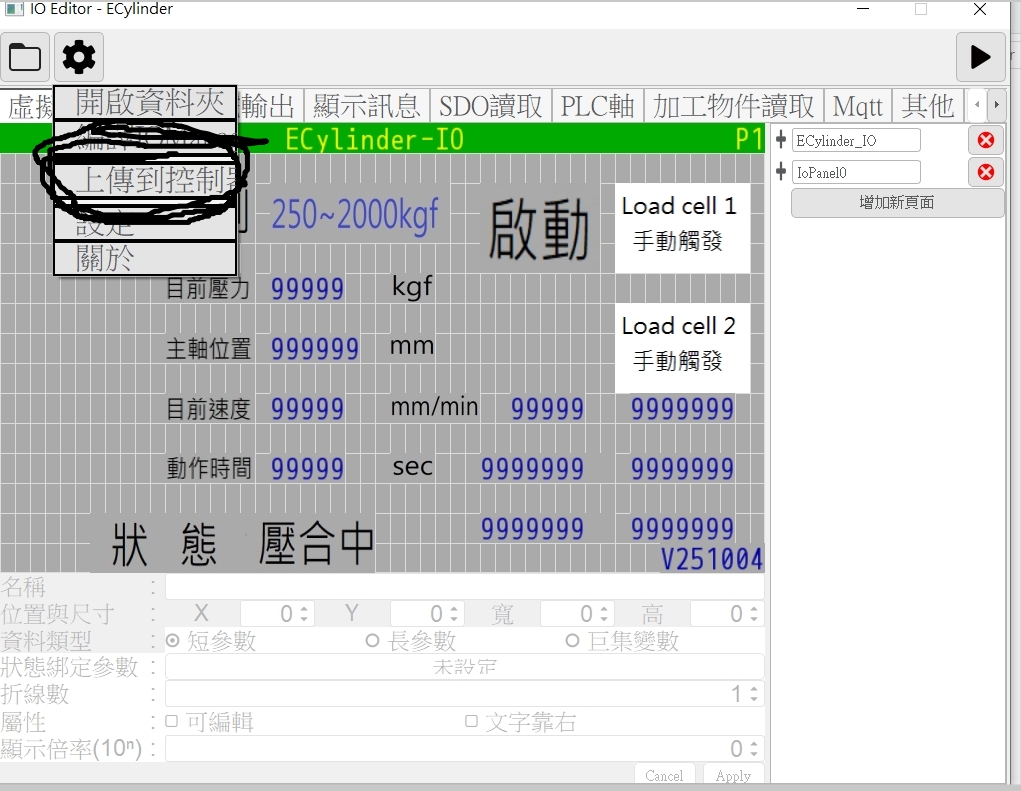
CNC檔 EzCam_Release

執行EZ物件這個程式

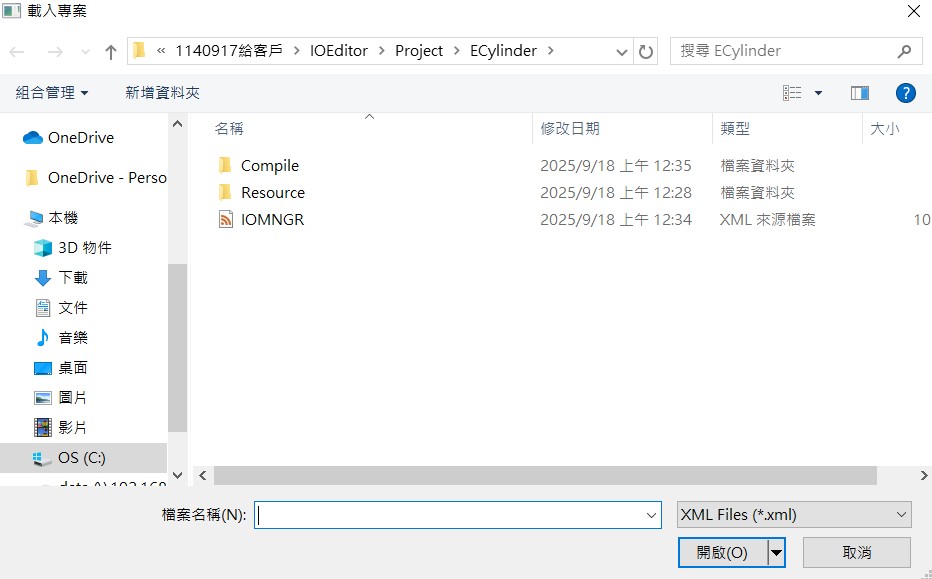
選擇載入專案
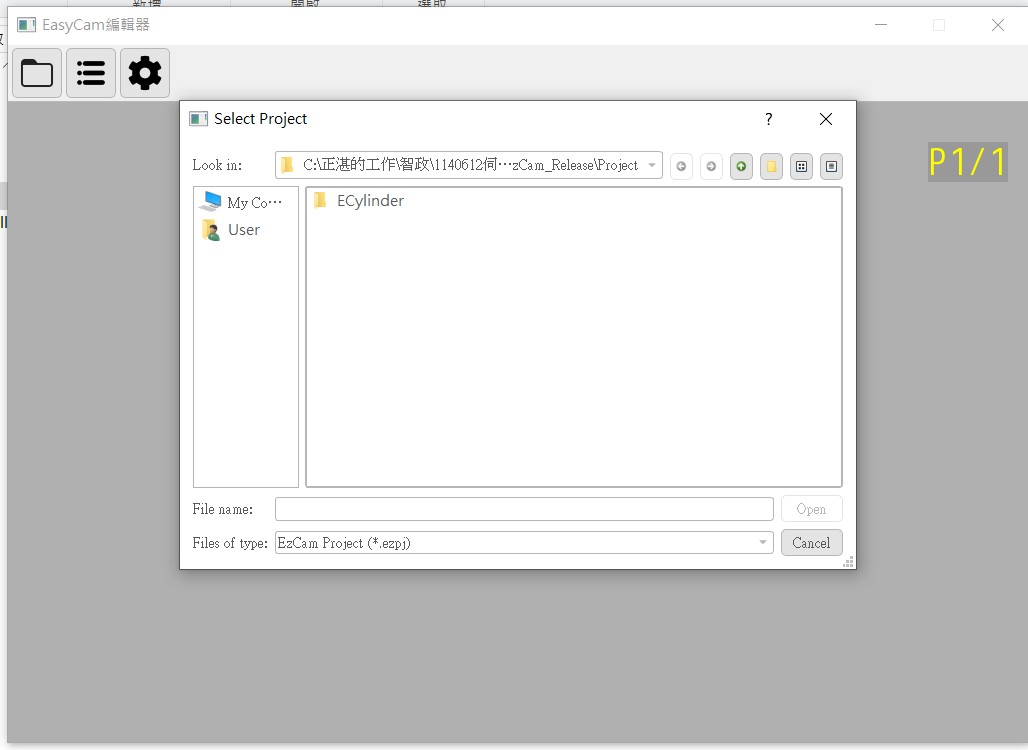
進ECylinder目錄

選擇ECylinder.expj
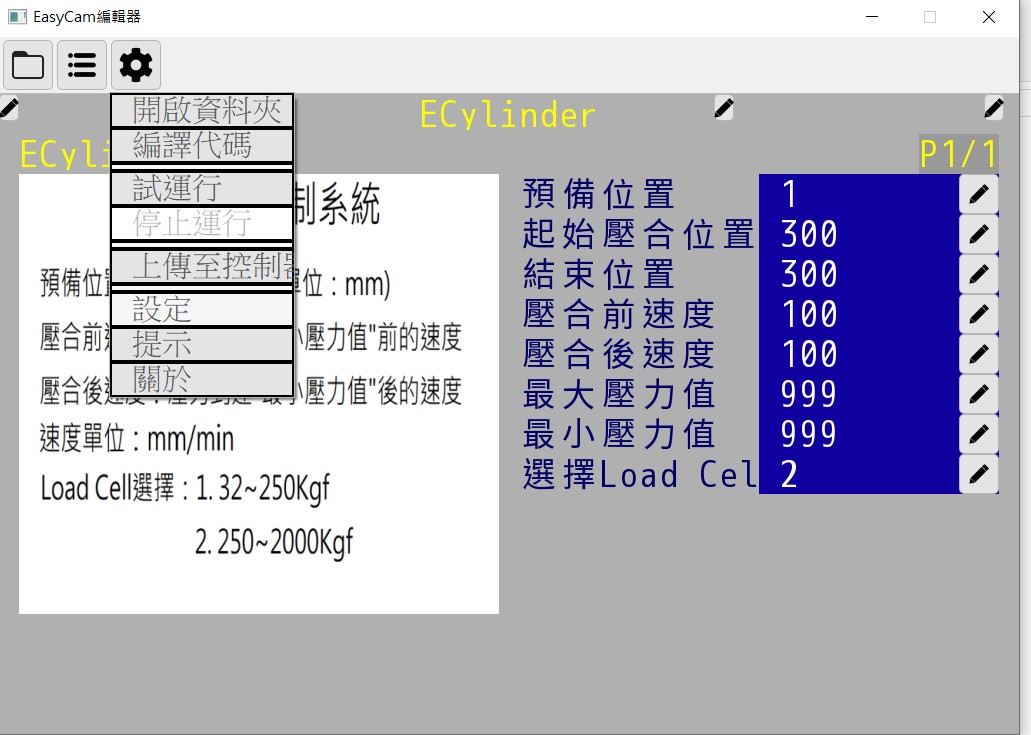
開啟畫面後選擇齒輪圖案->選"設定"

IP那一格要設定目前控制器的IP

設定完IP後,在選齒輪圖案->上傳至控制器
等他上傳完成CNC的部分就完成了
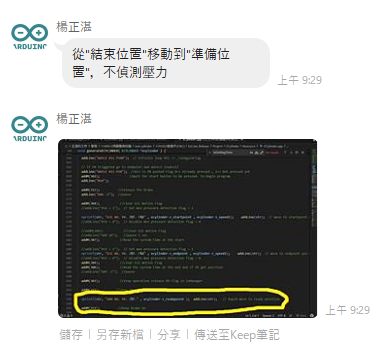
PLC檔
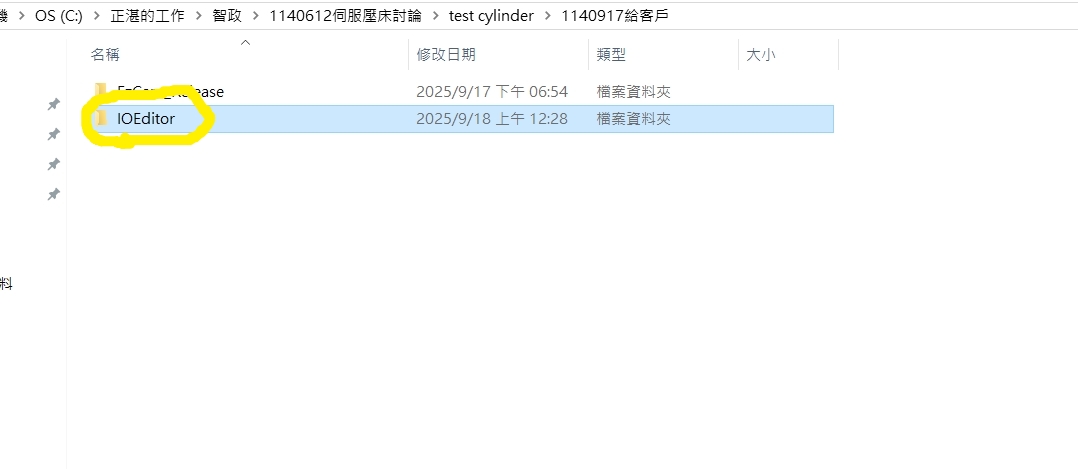

執行Editor
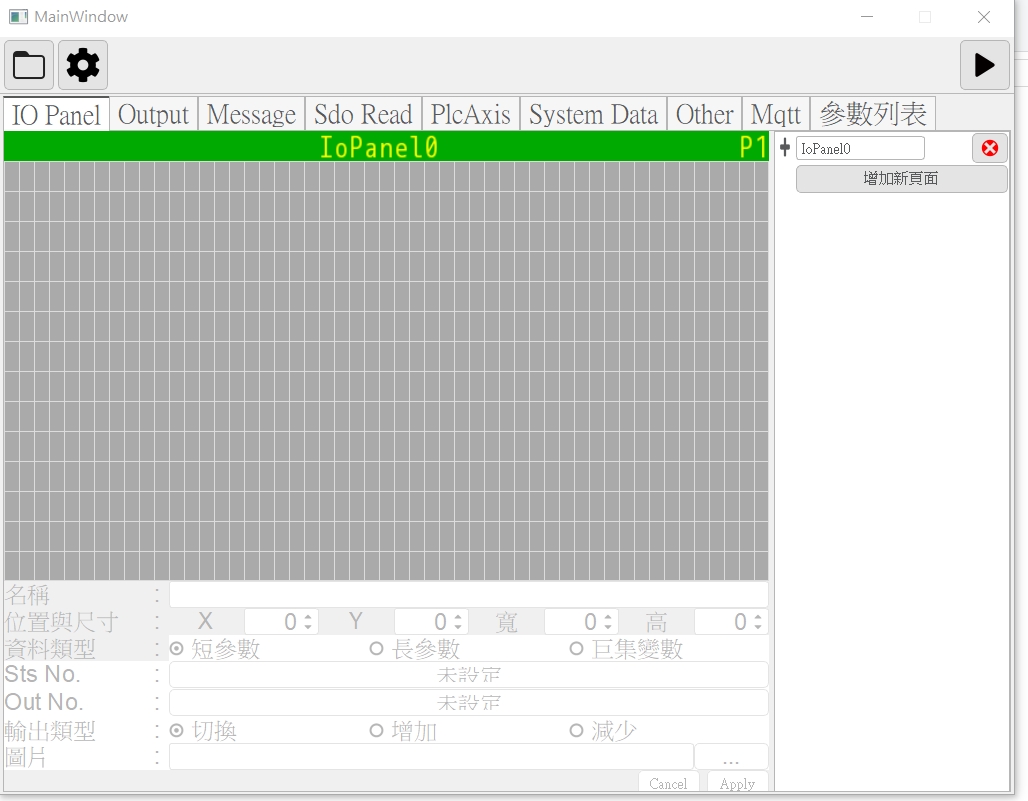
再來選載入專案
選IOMNGR這一個
和剛剛一樣設定控制器IP和上傳到控制器
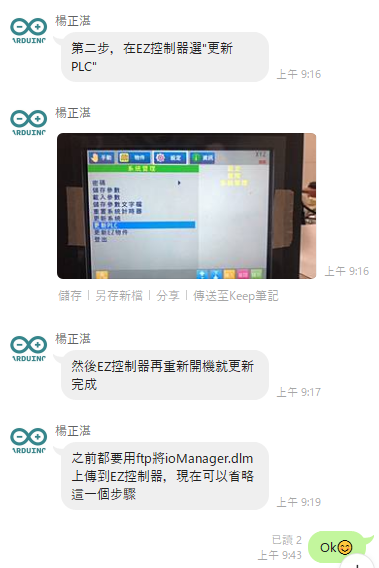
再來是FTP上傳檔案
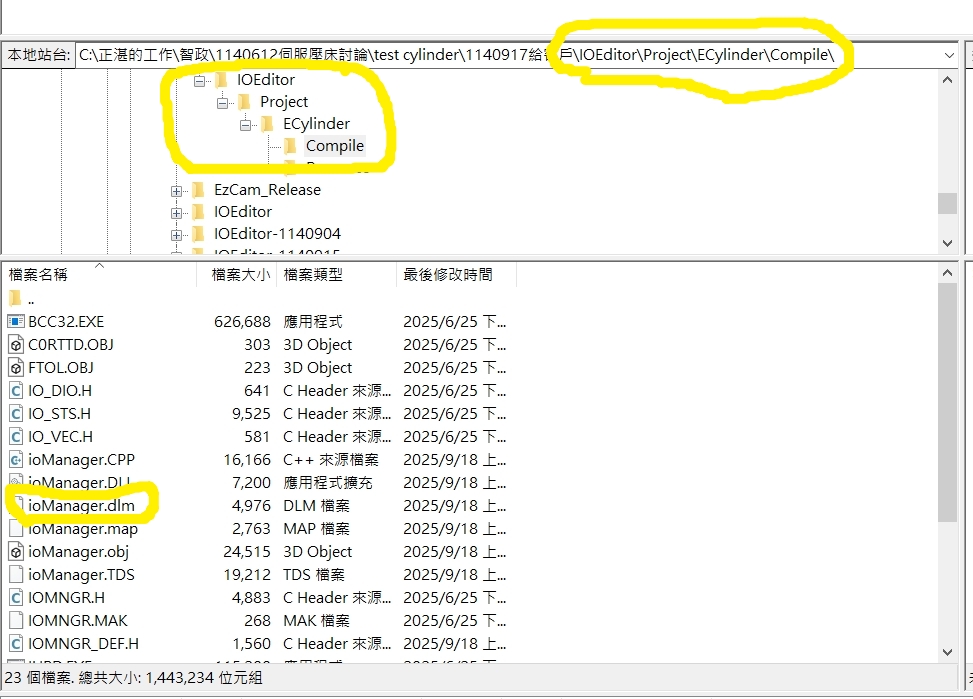
用ftp把ioManager.dlm上傳到控制器
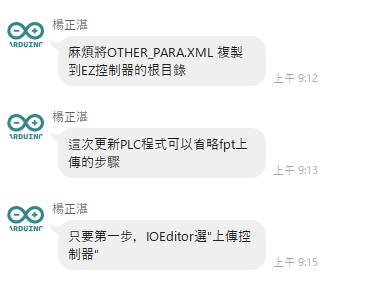
再來就是在控制上選擇更新PLC程式並重新開機就可以了
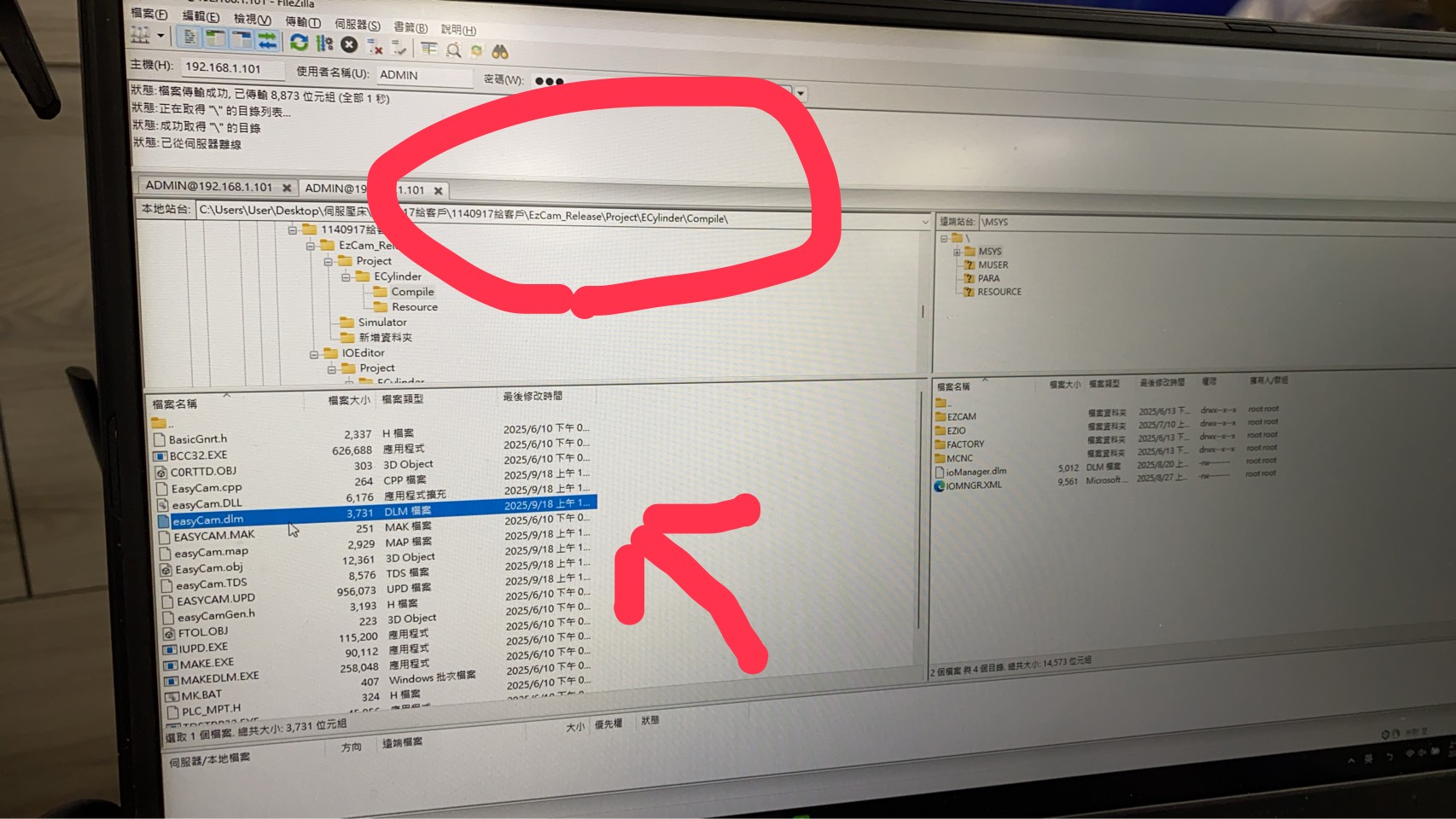
EzCam_Release在軟體上傳就可以,不用ftp上傳。
IOEdit才需要用ftp上傳
114.09.08
114.08.11
114.08.09
114.08.08
114.07.29
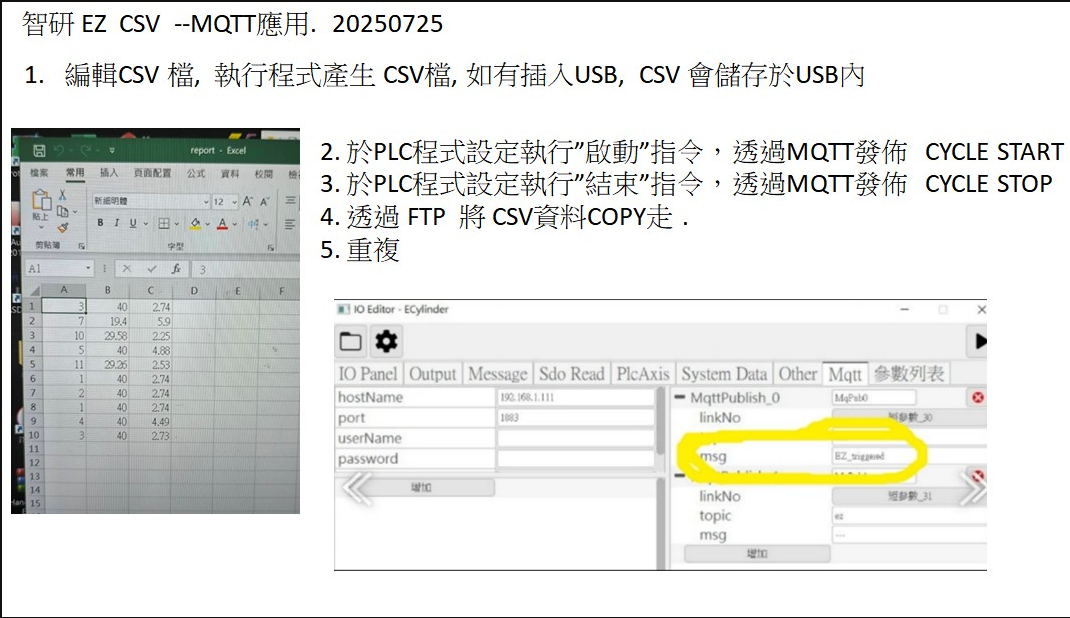
伺服壓床網域連線

擷取訊號,轉成EXCEL
114.07.25

114.07.23
114.07.23
台中智政出差

操作說明link

目錄
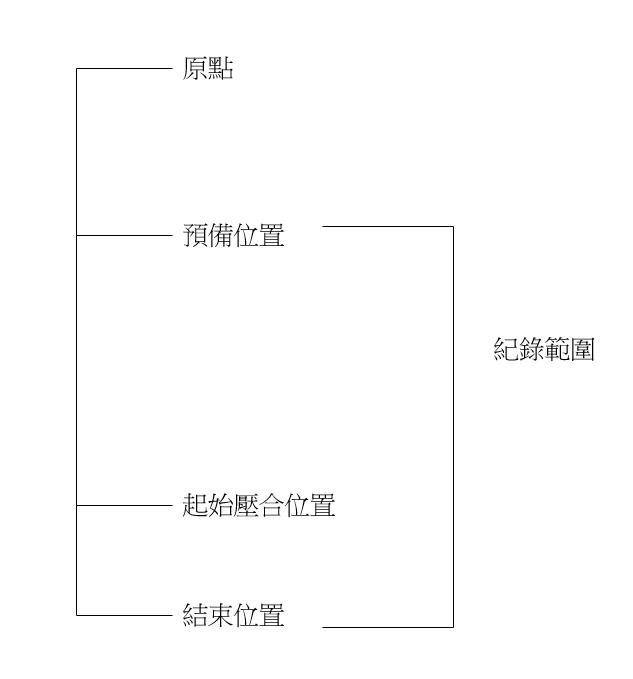
第1頁 紀錄
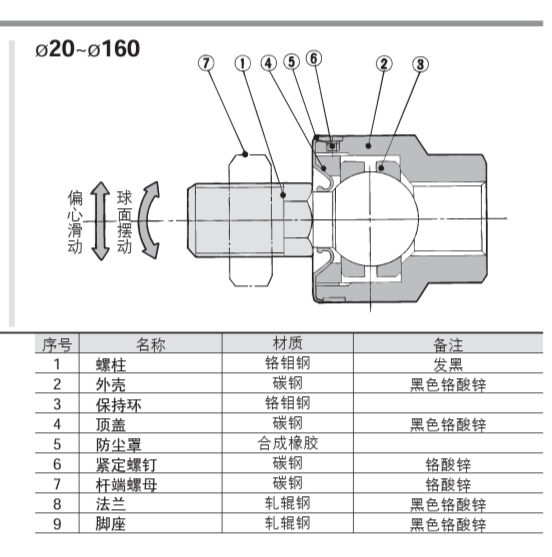
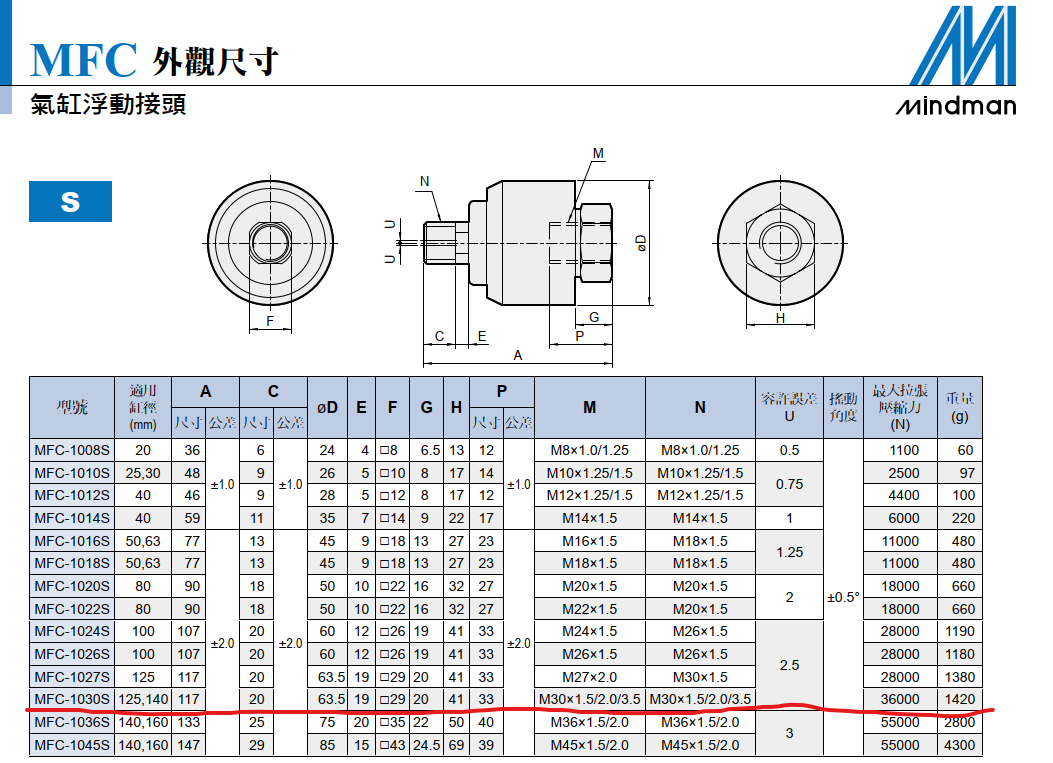
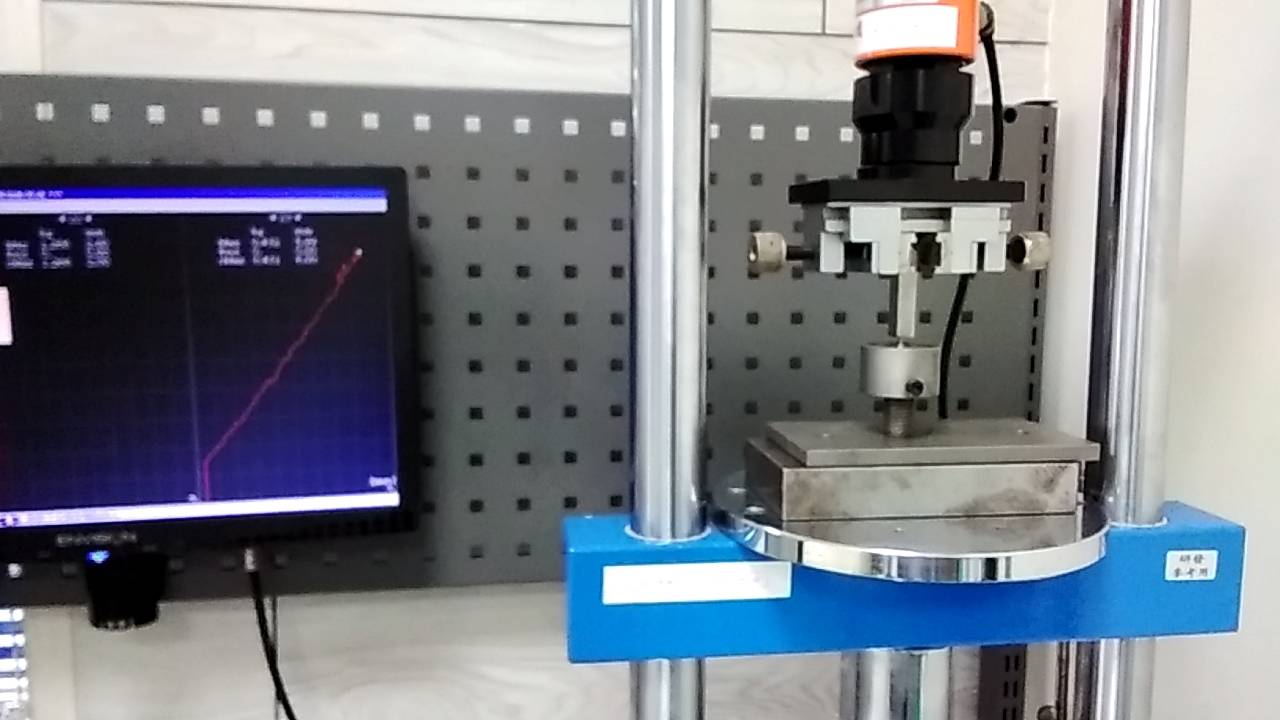
第2頁 氣缸浮動接頭規格及壓合影片
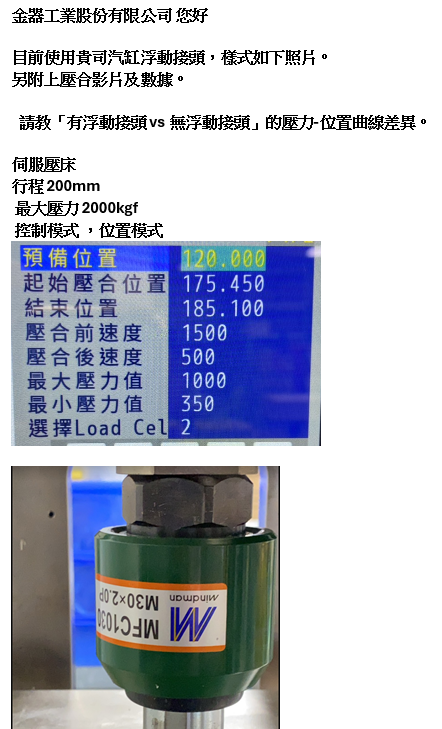
第3頁 氣缸浮動接頭 詢問金器
第4頁 定位彈簧影響
第5頁 台達浮動壓頭範例
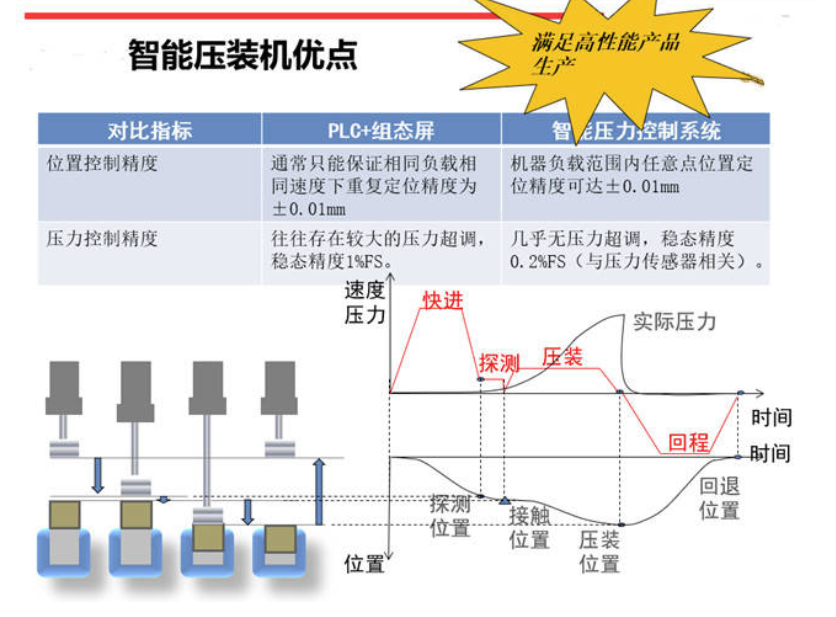
第6頁 伺服压力机压装曲线显示
第7頁 電動缸HP095
氣缸浮動接頭 MFC-1030S 最大拉張壓縮力 36000(N) = 3670.98(kgf)
氣缸浮動接頭 link

詢問ChatGPT 參考用
行程 200mm
最大壓力 2000kgf
控制模式 ,位置模式
比較「有浮動接頭 vs 無浮動接頭」的壓力-位置曲線差異。
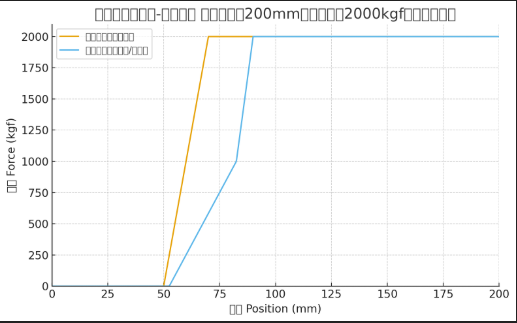
我已畫出比較圖並附上範例數據表(取樣每50點)。圖示說明與重點如下:
圖中模型設定(用於示意)
-
行程:200 mm(你提供)
-
最大壓力:2000 kgf(你提供)
-
位置控制模式
-
假設接觸位置(無浮動):50 mm
-
無浮動接頭(剛性)模型:接觸後在約 20 mm 內以較高剛性上升到 2000 kgf(曲線陡)
-
有浮動接頭模型:包含約 2.5 mm 死區(初期力不傳遞)、接著以較低初始剛性上升,之後在進一步壓縮時逐漸轉為較高剛性(曲線較平緩、延遲到達最大力)
圖中可觀察到的差異(重點)
-
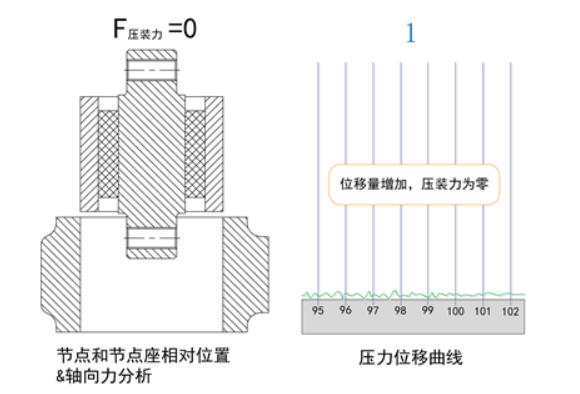
死區 / 延遲:有浮動接頭在接觸點附近出現力傳遞的死區(position-力曲線從零延後開始上升),這會造成位置控制器誤判尚未接觸而繼續移動。
-
斜率差異(等效剛性):有浮動接頭初期斜率較小(較軟),壓力上升較緩慢;無浮動接頭斜率較大,力快速上升。
-
重複性 / 精度:浮動接頭讓「同一位置對應的壓力」變得更不穩定,長時間使用還可能產生零點漂移。
-
控制回路影響:在位置控制模式下,浮動接頭可能導致控制器在達到預定位置時壓力未達標,需要調整控制參數或改用力/位置混合控制(或增加力回授濾波與前饋)。
-
詢問金器工業
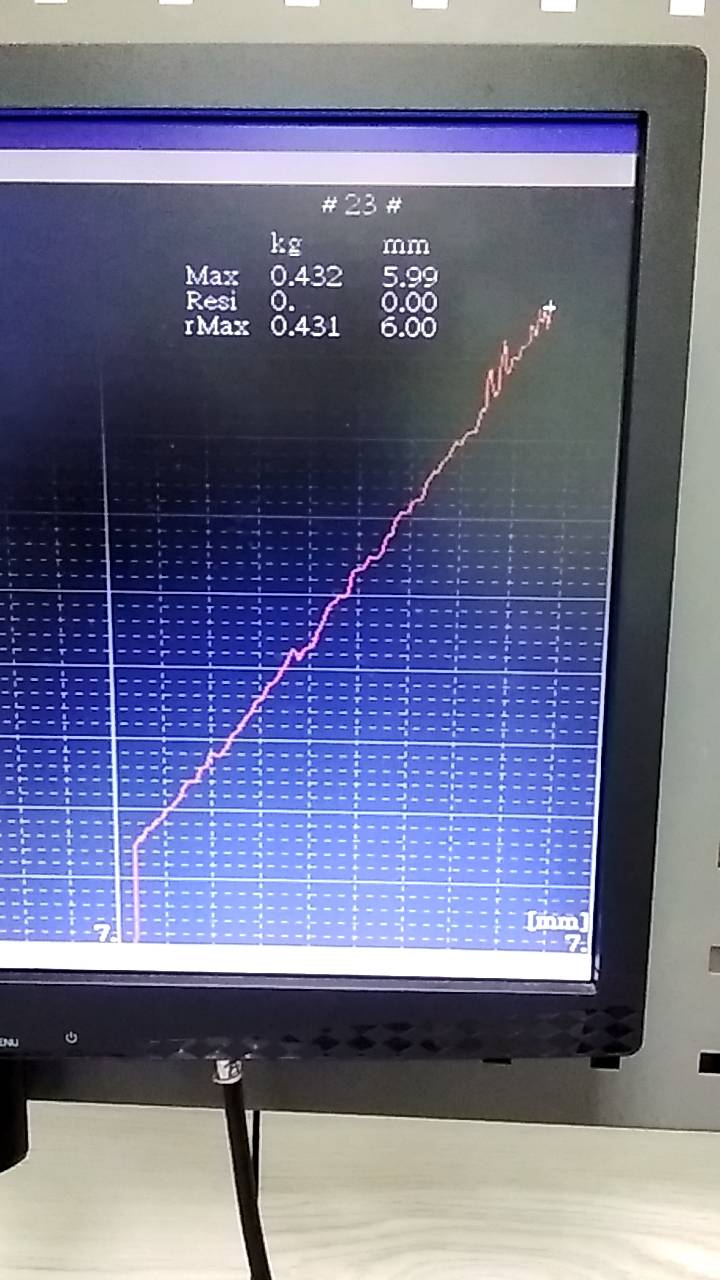
定位彈簧影響 2025.10.07
彈力432g
台達浮動壓頭

台灣三住


電動缸HP095
HP095_S7_P05_CG_S200_U2D_S9